Гост р 50446-92. индикаторы знакосинтезирующие газоразрядные. методы измерения частотно-временных параметров
Содержание:
- Переходный процесс
- Устройство
- Схема реализации d-триггера
- Применение
- Характеристики импульсов
- Принцип работы ШИМ контроллера
- Широтно-импульсный преобразователь
- Чем отличается скважность и коэффициент заполнения импульсов
- Анализ работы усилителя НЧ
- Виды D триггера
- Принцип работы
- Общая информация
- Что такое Д триггер
Переходный процесс
Рассмотрение импульсных устройств и схем не возможно без представлении о переходном процессе. Он возникает в цепях при различных коммутациях, то есть при включении или выключении элементов схемы, источников напряжения, при коротких замыканиях отдельных цепей и т.д. Переходный процесс объясняется тем, что энергия электромагнитных полей, связанных с цепью, в разные промежутки времени неодинакова, а резкое изменение энергии невозможно из-за ограниченной мощности источников питания.
Исходя из вышесказанного, можно сделать вывод, что напряжение на ёмкости и ток в индуктивность не могут изменяться скачкообразно, так как данные параметры определяют энергию электрического поля конденсатора и магнитного поля катушки индуктивности.
Таким образом, можно сделать вывод, что при рассмотрении импульсных схем наибольшее внимание необходимо обратить на цепи, представляющие собой комбинации резисторов и конденсаторов или резисторов и катушек индуктивностей (RC- и RL-цепей). Такие цепи применяются непосредственно для формирования импульсов, а также являются важнейшими элементами релаксационных генераторов, триггеров и других устройств
Поэтому ниже рассмотрим основные свойства элементарных RC- и RL-цепей, а также изменение формы импульсов при прохождении через эти цепи.
Влияние RC- и RL-цепей на импульсы различной формы
Несмотря на то, что формы электрических импульсов довольно разнообразны, их можно представить в виде суммы элементарных (типовых) напряжений трёх форм: скачкообразного, линейно изменяющегося и экспоненциального. Поэтому рассмотрим воздействие различных форм напряжений на RC- и RL-цепи.
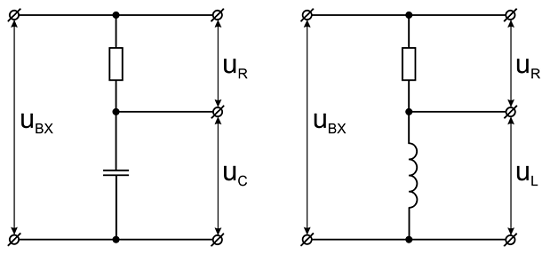
Изображение RC- и RL-цепей.
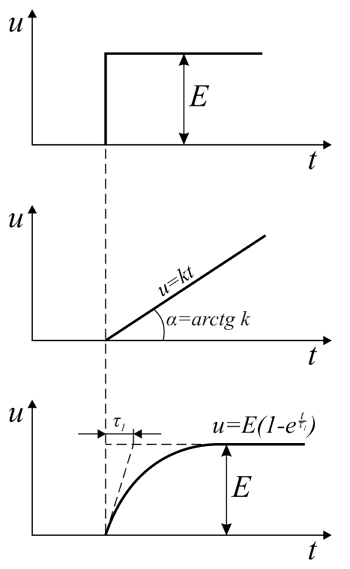
Элементарные формы напряжения (сверху вниз): ступенчатое, линейно-изменяющееся, экспоненциальное.
Ступенчатое изменение напряжения. При подключении RC-цепи к источнику постоянного напряжения uвх = Е = const, напряжения на конденсаторе и резисторе будет изменяться по экспоненциальному закону:
где е – математическая постоянная, е = 2,72; t – время, с;τ – постоянная времени, с. τ = RC.
С определением напряжения всё понятно, но в практике чаще возникает вопрос о времени установления напряжения. Например, необходимо вычислить время за которое на конденсаторе установится напряжение равное uС = 0,95 Е. Простым преобразованием формулы напряжения получим
Устройство
Что такое осциллограф, можно выяснить на примере типовой конструкции:
- вакуумная трубка (ЭЛТ) покрыта изнутри люминофором, который светится при попадании электронных лучей;
- блок горизонтальной развертки формирует пилообразные сигналы вместе с импульсами «гашения» луча при возврате в исходное положение;
- усилитель увеличивает амплитуду входного сигнала до необходимого уровня чувствительности ЭЛТ;
- для синхронизации развертки применяют внутренний генератор тактовой частоты или внешний источник.
Устройство осциллографа
Экран
На картинке выше приведена блок схема осциллографа с электронно-лучевой трубкой. В современных моделях часто применяют дисплеи, созданные с применением технологий жидких кристаллов. Они экономичнее и надежнее, весят меньше. Координатную сетку наносят на прозрачную накладку либо формируют программным способом.
Современный экран позволяет уменьшить осциллограф что это такое на практике демонстрирует данная картинка
Сигнальные входы
В многолучевых осциллографах сохранен базовый принцип работы, однако сигналы подают на отдельные каналы. В каждом из трактов установлен собственный усилитель. Регулировкой выравнивают амплитуды для удобного сравнения нескольких показателей.
К сведению. При наличии слишком большой постоянной составляющей луч отклоняется за пределы экрана. Чтобы вернуть его в рабочую область, применяют переключение в режим «закрытого» входа с разделительным конденсатором.
Управление развёрткой
В осциллографии применяют следующие виды развертки:
- «Автомат» – импульсы генерируются по заданному режиму без дополнительного вмешательства со стороны пользователя.
- Ждущий – применяют при малых уровнях (отсутствии) сигнала. Он запускается по определенному уровню фронта (спада). В некоторых случаях используют внешнее управление.
- Однократный – активируется принудительно. Его применяют для исследования одиночных сигналов (последовательностей из нескольких импульсов).
Синхронизация развёртки с исследуемым сигналом
Чтобы обеспечить неподвижность «картинки», траекторию движения луча по экрану необходимо согласовать с процессом прохождения сигнала. Задачу решают с помощью запуска развертки по нулевому или другому уровню на входе. Ограничением является порог восприятия частоты человеческим глазом. От 18-22 Гц и выше мерцания не заметны.
К сведению. Отсутствие синхронизации проявляется как движущееся изображение. Ручной настройкой устанавливают запуск по фронту (спаду), выбирают оптимальный уровень для стабилизации.
Схема реализации d-триггера
В отличие от схем RS, данные устройства управляются с применением одного информационного входа. Это удобно, так как в двоичной системе один бит принимает только два значения (ноль или единицу). Кроме экономии проводников, такое решение помогает изменять задержку с применением регулировок частоты синхронизирующего сигнала.
Схема реализации триггера на транзисторах
Вместо рассмотренных выше ТТЛ элементов для создания аналогичного устройства можно применить типовые транзисторы, созданные с применением КМОП технологии. На картинке изображен d триггер, принцип работы которого представлен ниже:
- при отсутствии сигнала на входе C транзистор VT1 находится в закрытом состоянии, не пропускает ток через полупроводниковый затвор;
- в этом состоянии не имеет значения уровень сигнала на D;
- если подать на С единицу, переход откроется;
- инвертор D1 обеспечит передачу на выход Q сигнала;
- два транзистора VT2 и VT3 образуют второй инвертор, который обеспечивает функционирование схемы в режиме типичного D триггера.
Таким образом, как и при работе с элементарными логическими компонентами, здесь данные состояния сохраняются только при нулевом уровне синхронизирующего сигнала. При увеличении его до уровня открытия полупроводникового перехода информация на входе и выходе будет повторяться с минимальной задержкой.
Для объективного анализа схемотехники надо изучить переходные процессы. Дело в том, что базовые для логических уравнений значения (ноль и единица) не всегда способны физически соответствовать идеальным значениям. Допустим, что управляющий сигнал поступает одновременно со сменой информационного. В этом случае триггер переходит в нестабильное состояние.
Ошибки проявляются в сбоях, когда последующие логические элементы ошибочно воспринимают амплитуду входных сигналов. Подобные ошибки могут блокировать полностью работу вычислительных устройств и другой техники.
Паразитные импульсные помехи образуют шумы в радиочастотном диапазоне. Состояние неопределенности увеличивает временные задержки при прохождении сигналов. Чтобы минимизировать вредное влияние и правильно делать конструкторские расчеты, производители триггеров указывают в сопроводительной документации минимальные допустимые параметры:
- setup time – промежуток перед синхронизирующим импульсом;
- hold time – длительность информационного сигнала.
Оценочный параметр MTBF показывает величину, обратно пропорциональную скорости отказов. Им определяют способность триггеров поддерживать стабильность рабочих процессов.
Применение
Работа с осциллографом позволяет выполнять ряд действий, не связанных с визуализацией:
- измерение амплитуды сигнала;
- контроль временных интервалов;
- настройку каналов звука в радиоаппаратуре;
- наблюдение фигур Лиссажу;
- курсорные измерения в современных моделях;
- математические операции-функции;
- захват строки телевизионного сигнала.
Это только некоторая часть опций, которые можно выполнить при помощи этого прибора.
Наблюдение фигур Лиссажу
При необходимости подстроить частоту сигнала одного источника под частоту другого применяют этот приём. Для работы используют два генератора частоты и осциллограф с опцией XY-режима. Фигуры Лиссажу – это рисунки, созданные точкой, колеблющейся в одной плоскости, но в двух взаимно-перпендикулярных направлениях.
Интересно. Если подать на каждый канал двухканального прибора сигналы от двух разных генераторов и включить на устройстве режим XY, то на экране получится фигура. Фигуры будут менять свои очертания в зависимости от кратности частот генераторов.
На практике метод используется для определения неизвестной частоты, при сравнении её с известной частотой. Зная, осциллограмма какого сигнала изображена на рисунке, по фигуре, которая получилась, можно определить искомый параметр.
Таблица с фигурами Лиссажу
Курсорные измерения
В аппаратах современного поколения имеется вспомогательный интерфейс в виде курсоров. Это прямые линии, выводимые на экран. Они могут быть расположены и перпендикулярно друг к другу. Курсор можно наводить на любую точку графика сигнала и видеть её координаты. Это уровень напряжения и момент времени по осям X и Y.
Курсорные измерения упрощают считывание характеристик исследуемых сигналов. Отпадает зависимость от подсчёта количества клеток по шкале и умножения на цену деления по обеим осям.
Математические функции
К математическим операциям с функциями, определяемым с помощью осциллографа, относятся:
- сложение и вычитание;
- абсолютное значение;
- преобразования Фурье;
- интегрирование.
Если остановиться на этих опциях, то сложение и вычитание мгновенных значений исследуемых осциллограмм выполняется быстро, результат выводится на экран в виде сигнала.
Следующая функция определяет абсолютное значение сигнала и отображает его в вольтах.
Определить гармонические частоты (компоненты сигнала) поможет математическая функция преобразование Фурье.
Интеграл исследуемого сигнала можно вычислить с помощью математической функции интегрирования.
Захват строки телевизионного сигнала
В осциллоскопах с ЭЛТ, а также в современных специальных моделях встречается особый режим – телевизионная синхронизация. Одну или несколько телевизионных строк можно отобразить на экране, выбрав их из видеопакета. При помощи таких осциллографов в телестудиях контролируют технические характеристики записывающей и передающей аппаратуры.
Характеристики импульсов
Форма импульсов
Важной характеристикой импульсов является их форма, визуально наблюдать которую, можно, например, на экране осциллографа. В общем случае форма импульсов имеет следующие составляющие: фронт — начальный подъём, относительно плоская вершина (не для всех форм) и срез (спад) — конечный спад напряжения
Существует несколько типов импульсов стандартных форм, имеющих относительно простое математическое описание, такие импульсы широко применяются в технике
- Прямоугольные импульсы — наиболее распространённый тип
- Пилообразные импульсы
- Треугольные импульсы
- Трапецеидальные импульсы
- Экспоненциальные импульсы
- Колокольные (колоколообразные) импульсы
- Импульсы, представляющие собой полуволны или другие фрагменты синусоиды (обрезка по горизонтали или по вертикали)
Кроме импульсов стандартной, простой формы иногда, в особых случаях, используются импульсы специальной формы, описываемой сложной функцией, существуют также сложные импульсы, форма которых имеет в значительной степени случайный характер, например, импульсы видеосигнала.
Параметры импульсов
В общем случае импульсы характеризуются двумя основными параметрами — амплитудой (размахом — разностью напряжений между пьедесталом и вершиной импульса) и длительностью (обозначается τ или tи). Длительность пилообразных и треугольных импульсов определяется по основанию (от начала изменения напряжения до конца), для остальных типов импульсов длительность принято брать на уровне напряжения 50 % от амплитуды, для колоколообразных импульсов иногда используется уровень 10 %, длительность искусственно синтезированных колоколообразных импульсов (с чётко выраженным основанием) и полуволн синусоиды часто измеряется по основанию.
Выброс на вершине прямоугольного импульса
Для разных типов импульсов также вводят дополнительные параметры, уточняющие форму или характеризующие степень её неидеальности — отклонения от идеальной. Например, для описания неидеальности прямоугольных импульсов используются такие параметры, как, (для идеального прямоугольного импульса они равны нулю), неравномерность вершины, а также размер выбросов напряжения после фронта и среза, возникающих в результате переходных паразитных процессов.
Спектральное представление импульсов
Кроме временного представления импульсов, наблюдаемого по осциллографу, существует спектральное представление, выраженное в виде двух функций — амплитудного и фазового спектра.
Спектр одиночного импульса является непрерывным и бесконечным. Амплитудный спектр прямоугольного импульса имеет чётко выраженные минимумы по шкале частот, следующие с интервалом, обратным длительности импульса.
Принцип работы ШИМ контроллера
Задача ШИМ контроллера состоит в управлении силовым ключом за счёт изменения управляющих импульсов. Работая в ключевом режиме, транзистор находится в одном из двух состояний (полностью открыт, полностью закрыт). В закрытом состоянии ток через p-n-переход не превышает несколько мкА, а значит, мощность рассеивания стремится к нулю. В открытом состоянии, несмотря на большой ток, сопротивление p-n-перехода чрезмерно мало, что также приводит к незначительным тепловым потерям. Наибольшее количество тепла выделяется в момент перехода из одного состояния в другое. Но за счёт малого времени переходного процесса по сравнению с частотой модуляции, мощность потерь при переключении незначительна.
Широтно-импульсная модуляция разделяется на два вида: аналоговая и цифровая. Каждый из видов имеет свои преимущества и схемотехнически может реализовываться разными способами.
Аналоговая ШИМ
Принцип действия аналогового ШИ-модулятора основан на сравнении двух сигналов, частота которых отличается на несколько порядков. Элементом сравнения выступает операционный усилитель (компаратор). На один из его входов подают пилообразное напряжение высокой постоянной частоты, а на другой – низкочастотное модулирующее напряжение с переменной амплитудой. Компаратор сравнивает оба значения и на выходе формирует прямоугольные импульсы, длительность которых определяется текущим значением модулирующего сигнала. При этом частота ШИМ равна частоте сигнала пилообразной формы.
Цифровая ШИМ
Широтно-импульсная модуляция в цифровой интерпретации является одной из многочисленных функций микроконтроллера (МК). Оперируя исключительно цифровыми данными, МК может формировать на своих выходах либо высокий (100%), либо низкий (0%) уровень напряжения. Однако в большинстве случаев для эффективного управления нагрузкой напряжение на выходе МК необходимо изменять. Например, регулировка скорости вращения двигателя, изменение яркости светодиода. Что делать, чтобы получить на выходе микроконтроллера любое значение напряжения в диапазоне от 0 до 100%?
Вопрос решается применением метода широтно-импульсной модуляции и, используя явление передискретизации, когда заданная частота переключения в несколько раз превышает реакцию управляемого устройства
Изменяя скважность импульсов, меняется среднее значение выходного напряжения. Как правило, весь процесс происходит на частоте в десятки-сотни кГц, что позволяет добиться плавной регулировки
Технически это реализуется с помощью ШИМ-контроллера – специализированной микросхемы, которая является «сердцем» любой цифровой системы управления. Активное использование контроллеров на основе ШИМ обусловлено их неоспоримыми преимуществами:
- высокой эффективности преобразования сигнала;
- стабильность работы;
- экономии энергии, потребляемой нагрузкой;
- низкой стоимости;
- высокой надёжности всего устройства.
Получить на выводах микроконтроллера ШИМ сигнал можно двумя способами: аппаратно и программно. В каждом МК имеется встроенный таймер, который способен генерировать ШИМ импульсы на определённых выводах. Так достигается аппаратная реализация. Получение ШИМ сигнала с помощью программных команд имеет больше возможностей в плане разрешающей способности и позволяет задействовать большее количество выводов. Однако программный способ ведёт к высокой загрузке МК и занимает много памяти.
Примечательно, что в цифровой ШИМ количество импульсов за период может быть различным, а сами импульсы могут быть расположены в любой части периода. Уровень выходного сигнала определяется суммарной длительностью всех импульсов за период. При этом следует понимать, что каждый дополнительный импульс – это переход силового транзистора из открытого состояния в закрытое, что ведёт к росту потерь во время переключений.
Широтно-импульсный преобразователь
Широтно-импульсный преобразователь осуществляет преобразование кодовых сигналов из диапазона чисел от 0 до 256 в длительность импульсов. Причем если на входе нуль, то на выходе формируется импульс отрицательной полярности и максимальной длительности, равной периоду следования импульсов широтно-импульсного преобразователя. При сигнале на входе, равном 256, формируется положительный импульс максимальной длительности; при сигнале на входе, равном 128, на выходе широтно-импульсного преобразователя формируются за период два разнополярных импульса одинаковой длительности.
Реверсивные широтно-импульсные преобразователи ( с быстродействующими полупроводниковыми управляющими устройствами) превосходят по своим динамическим качествам известные схемы реверсивных управляемых выпрямителей с совместным и раздельным управлением, так как не требуют фильтра для ограничения скорости изменения управляющего сигнала на входе и не имеют паузы между работой выпрямителей разного знака и сопутствующего ей размыкания контура регулирования.
Широтно-импульсные преобразователи постоянного напряжения подразделяют на нереверсивные и реверсивные.
Широтно-импульсные преобразователи постоянного напряжения подразделяют на нереверсивные и реверсивные. Последние представляют собой автономные мостовые инверторы напряжения, широко используемые для регулирования электроприводов. Нереверсивные преобразователи в свою очередь подразделяют на последовательные и параллельные.
Применение широтно-импульсных преобразователей для управления торможением придает новые качества режиму электродинамического торможения
Изменяя скважность замыкания накоротко сопротивления тормозного реостата, можно управлять тормозным током, а следовательно, и тормозным моментом в широких пределах.
|
Система импульсного регулирования скорости вращения двигателя независимого возбуждения. |
В качестве широтно-импульсного преобразователя используется тиристорный преобразователь с одной ветвью коммутации.
|
Схема электропривода троллейного электровоза с ши-ротно-импульсным управлением. |
В качестве широтно-импульсного преобразователя в схеме применяется тиристорный преобразователь с двумя ветвями коммутации.
Характерная особенность нереверсивного широтно-импульсного преобразователя постоянного тока состоит в том, что он преобразует плавно изменяющийся входной сигнал в последовательность импульсов напряжения постоянной амплитуды и полярности, но разной длительности
Здесь Rm и LH — активное сопротивление и индуктивность нагрузки; П — тиристорный преобразователь постоянного тока; ШИМ — широтно-импульсный модулятор; Дг — диод, шунтирующий нагрузку; V — напряжение источника электрической энергии; % — напряжение управления; / н М 2 — ток нагрузки, / 1 — ток, протекающий через нагрузку в интервале времени O t tn — iz — ток, протекающий через нагрузку в интервале времени tu t T; tu — длительность импульса напряжения; Т — период коммутации; ts / T — скважность импульсов напряжения.
. Модуляция в широтно-импульсных преобразователях может осу ществляться на постоянной или переменной несущей частоте.
Модуляция в широтно-импульсных преобразователях может осу ществляться на постоянной или переменной несущей частоте.
Таким образом, широтно-импульсный преобразователь является звеном существенно нелинейным, а следовательно, для моделирования импульсных систем необходимо иметь возможность осуществлять имитацию на аналоговых машинах генераторов импульсов и широтно-импульсных модуляторов.
Регулятор состоит из таристорного широтно-импульсного преобразователя постоянного тока, необходимой контактной аппаратуры и устройства управления. В качестве широтно-импульсного преобразователя используется преобразователь, выполненный по схеме несимметричного тиристорного триггера.
Весьма важными областями применения широтно-импульсного преобразователя является привод станков и привод грузоподъемных механизмов на морских судах.
Кроме того, у широтно-импульсных преобразователей отсутствуют ограничения по разрешающей способности, характерные для управляемых выпрямителей при фазовом управлении ( проводящий вентиль не может быть заперт в любой момент времени), что важно при конструировании электроприводов, оптимальных по быстродействию.
Чем отличается скважность и коэффициент заполнения импульсов
Одной из наиболее важных величин в импульсной электронике – это скважность, обозначаемая латинской буквой S. Она дает характеристику импульсам прямоугольной формы и показывает, как относится их период T ко времени t1
К примеру, коэффициент меандра равен 2, поскольку время t1 в этой последовательности составляет половину периода: S = T / t1 = 2.
И в числителе, и в знаменателе находится время, выраженное в секундах. При вычислениях они сокращаются, поэтому коэффициент является величиной, не имеющей единиц измерения.
Генератор скважности
Меандр представляет собой поток импульсов, в котором отрицательные и положительные части имеют одинаковую продолжительность.
Инверсия скважности имеет название коэффициент заполнения. Следовательно, скважность способна принимать множество значений от бесконечности до единицы, а рабочий цикл этого же потока импульсов, как еще могут называть коэффициент заполнения, способен принимать значения от 0 до 1
Часто удобней записывать не данный коэффициент, измерение которого производится десятичными дробями, а скважность, которая равна, чаще всего, целому числу.
Например: D = 0,5 или S = 2 – эти две записи означают одно и то же, но вторую читать легче. Рабочий цикл S = 10 соответствует показателю D = 0,1 – это означает, что длительность импульса в 10 раз меньше его периода.
В широтно-импульсной модуляции (сокращенно, ШИМ) прибор изменяет ширину или продолжительность импульса, при этом будет соответственно изменяться и коэффициент. Частота при этом будет постоянной. В таком случае, чем больше величина, показывающая скважность, тем более узким будет импульс, и, наоборот – при минимальной скважности будет достигаться максимальная ширина.
При изучении данного явления просматривается этимологическая связь с словом «скважина» из русского языка: широкая скважина (на самом деле, это промежуток между импульсами в потоке) – положительные части узкие, узкая скважина – положительные части широкие (но свободное пространство между ними мало).
Важно: У англоязычных авторов термин «скважность» не встречается вовсе, а для его замены применяют понятие «рабочий цикл» – аналогичный российскому коэффициенту заполнения (D). Однако в английской литературе он выражается не дробным числом, а процентом
Например, если D = 0,5 в западных пособиях будет указано: D = 50%.
Анализ работы усилителя НЧ
В идеале, на эквиваленте нагрузки должно быть, по форме, то же, что и на входе, то есть ровные прямоугольные импульсы, как на рис.4. Если это так, то усилитель просто замечательный.
Если будет наблюдаться завал фронта и спада (рис.5) это говорит о том, что на высших частотах усиление данного усилителя снижается. Степень этого снижения может быть разной, если совсем плохо — это как на рисунке 6.
Рис. 4. Ровные прямоугольные импульсы на экране осциллографа.
Рис. 5. Завал фронта и спада на экране осциллографа.
Рис. 6. Если все плохо с УЗЧ.
При завале усиления на низких частотах осциллограмма будет выглядеть как на рисунке 7.
Рис. 7. Завал усиления усилителя на низких частотах, осциллограмма.
Подъем усиления на низких частотах, — осциллограмма на рис. 8. Падение усиления на низких и средних частотах, — осциллограмма на рис. 9.
Подъем усиления на средних частотах, -осциллограмма на рисунке 10. Подъем усиления на высоких частотах, -осциллограмма на рисунке 11. Провал усиления в каком-то узком диапазоне частот — рис. 12.
Рис. 8. Подъем усиления на низких частотах — осциллограмма.
Рис. 9. Падение усиления на низких и средних частотах — осциллограмма.
Рис. 10. Подъем усиления на средних частотах — осциллограмма.
Рис. 11. Подъем усиления на высоких частотах — осциллограмма.
Рис. 12. Провал усиления в каком-то узком диапазоне частот.
Таким образом, всего лишь один сигнал прямоугольных импульсов частотой 1 кГц может рассказать очень много о работе усилителя ЗЧ.
Если у осциллографа нет калибратора, можно на вход усилителя ЗЧ подать прямоугольные импульсы от любого генератора прямоугольных импульсов частотой 1 кГц, например, сделанного на логических элементах или по другой схеме.
В том случае, если частоту импульсов на выходе генератора можно регулировать, можно будет более широко проанализировать работу усилителя ЗЧ.
Кроме того, используя тот же осциллограф с калибратором (или отдельным генератором импульсов) можно проследить прохождение сигнала и внутри схемы УН4, чтобы найти дефектный каскад, например, в УН4, построенного по сложной многокаскадной схеме.
Литература: РК-2017-03.
Виды D триггера
Типовые решения с применением представленных логических элементов рассмотрены ниже. Допустимы другие комбинации для удвоения частоты и решения других задач.
D-триггер синхронный
Рассмотрим на упрощенном примере основы функционирования. Для этого уберем сервисные входы. Диаграммы демонстрируют изменение сигналов при разных комбинациях управления. В таблице показаны состояния для записи единиц и нулей, а также в режиме хранения.
D триггер: таблица истинности, схема, временные графики
Если подать на С единицу (ноль), изменение на D сопровождается появлением аналогичного сигнала на выходе Q
Следует обратить внимание на временные задержки. Пока синхронизация отсутствует, изделие не срабатывает, вне зависимости от состояния информационного входа
В соответствующих режимах:
- Запоминается предыдущее состояние на выходе;
- Обеспечивается «прозрачность» – практически мгновенное повторение входных значений;
- Фиксируется выходной сигнал («защелкивается»), когда сигнала С нет.
D-триггер двухступенчатый
В таких схемах объединяют последовательно два триггера. Первый – настраивают по увеличению входного сигнала. Второй – по спаду. Как видно на рисунке, состояние изменяется не одновременно с появлением новой информации, а с определенной временной задержкой, длительность которой равна одному полному рабочему циклу сигнала синхронизации.
Схема и временная диаграмма двухступенчатого триггера
Принцип работы
Во всех схемах имеет значение длительность рабочих реакций, которая определяет время записи (стирания). Определенное значение имеет помехоустойчивость. В следующих разделах рабочие процессы рассмотрены подробно.
Элементы с управлением по уровню
В этом варианте изменение состояния происходит только при высоком уровне синхронизирующего сигнала. При соответствующем положении устройство копирует изменения на входе с небольшой технологической задержкой. Если на С – ноль, реакция на выходе отсутствует.
Временная диаграмма для управления триггером по уровню
Элементы с управлением по фронту
В соответствии с названием, здесь реализована схема управления по фронту (переднему и заднему). С помощью временной диаграммы можно рассмотреть рабочие циклы внимательно.
Изменение состояния при разных информационных (управляющих) сигналах
Допустим, что для управления выбран передний фронт. При С=0 состояние триггера не изменяется, вне зависимости от информационных сигналов, – одновременно с прохождением переднего фронта записывается аналогичное уровню D. В данном примере – единица. Следующие изменения происходят по такому же алгоритму.
Чтобы расширить базовую функциональность, устройство дополняют представленными выше сервисными входами (R и S). С их помощью состояние устанавливают произвольным образом (1 или 0) в любой нужный момент. Разумеется, для выполнения таких действий понадобятся дополнительные элементы управления.
К сведению. В этом варианте не имеет значения длительность управляющего сигнала. Для функционирования схемы его можно подать с применением инвертора в противофазе на два триггера Д типа, соединенные последовательно. Такое решение будет сопровождаться изменением состояния по заднему фронту (спаду).
Общая информация
К основным параметрам последовательности импульсов относятся:
- l амплитуда импульса – Um,
- l длительность импульса – tu,
- l длительность паузы – tn,
- l период следования T или частота f = 1/T следования.
Если длительность tu всех импульсов, входящих в состав последовательности, и всех пауз tn постоянна в течение времени, то она называется периодической.
Важным параметром периодического импульсного процесса является скважность импульсов S. Скважность импульсов – это отношение периода следования к длительности импульса, рассчитывается по формуле:
Эффективность S при управлении устройства достигается при стабильной частоте сигнала. Иногда используют обратную величину D – коэффициент заполнения, рассчитывается по формуле:
При равенстве tu и tn скважность равна 2, и сигнал называется меандром. S и D – безразмерные величины, так как время делится на время
В цифровых устройствах применяются импульсы различной формы. Формой импульса называется графическое изображение закона изменения импульсного напряжения во времени. На рис. ниже показаны формы сигналов:
- а – прямоугольная,
- б – трапецеидальная,
- в – экспоненциальная,
- г – колокольная,
- д – ступенчатая,
- е – пилообразная.
Техническая характеристика формы импульсов связана с количественной оценкой основных параметров импульса, свойств отдельных его участков, которые играют разную роль при воздействии импульса на устройство. На рис. выше изображены идеализированные формы импульса. Из-за переходных процессов в устройствах (формирования и усиления импульсов) существует реальная форма, например, прямоугольного импульса (рис. ниже).
Основные параметры импульса – это:
- l Размах импульса – Um,
- l Длительность импульса – tи,
- l Длительность переднего фронта – tф,
- l Длительность заднего фронта – tсп,
- l Спад вершины – ΔU,
- l Размах выброса заднего фронта – Um обр,
- l Длительность выброса заднего фронта – tи обр.
Указанные величины считываются между уровнями 0.1 и 0.9 от амплитуды в микросекундах, в зависимости от частоты сигнала. Амплитудные – в вольтах.
Определить параметры импульсного сигнала можно с помощью осциллографа, частотомера или мультиметра.
Что такое Д триггер
Триггерами называют устройства, способные длительное время поддерживать определенное состояние на выходе. Как правило, они контролируют соответствующие уровни напряжения. Изменения происходят при определенной комбинации входных сигналов.
Простейшие устройства этой категории создают по схеме RS. Они запоминают состояние сигнала, поданного на один из входов. Чтобы устранить процесс сбоев, который вызывают паразитные колебания при переходе сигнала из ноля в единицу и обратно, применяют синхронизацию. Этим дополнительным сигналом устанавливают точное время (интервал) для возможных изменений.
В обозначении Д триггера отмечена главная особенность. Буквой «Д» (D лат.) маркируют вход, на который подают информационный сигнал. Другой («С») используют для синхронизации записи. Отсутствие активности на нем исключает изменение базового состояния. Такое решение, в отличие от RS, позволяет изменять состояние с применением только одного источника данных.