Лазерный дальномер vchon h-40
Содержание:
- Технические характеристики:
- Принцип работы ИК датчика
- Диаграмма направленности
- Скетч для компьютера
- Виды датчиков
- Где используются датчики
- Примеры скетчей
- Схема
- Код проекта
- Плюсы и минусы использования
- Нелинейный выход
- Инструменты
- Разновидности датчиков
- Что такое дальномер
- Подключение датчика HC SR04
- Принцип работы ультразвукового дальномера
Технические характеристики:
| Модель | LDM-50H | LDM-60H | LDM-80H | LDM-100H |
| Диапазон измерений | 0,05 до 50 м* (0,16 футов до 164 футов*) | 0,05 до 60 м* (0,16 футов до 197 футов*) | 0,05 до 80 м* (0,16 футов до 262 футов*) | 0,05 до 100 м* (0,16 футов до 328 футов*) |
| Точность измерения на расстоянии до 10 м (стандартное отклонение, 2σ) | стандартно ±1,5 мм** (±0,06 дюймов**) | стандартно ±1,5 мм** (±0,06 дюймов**) | стандартно ±1,5 мм** (±0,06 дюймов**) | стандартно ±1,5 мм** (±0,06 дюймов**) |
| Единицы измерения | метр, дюйм, фут | метр, дюйм, фут | метр, дюйм, фут | метр, дюйм, фут |
| Класс опасности | 2 | 2 | 2 | 2 |
| Тип лазера | 635нм, <1мВ | 635нм, <1мВ | 635нм, <1мВ | 635нм, <1мВ |
| Расчет площади, объема | • | • | • | • |
| Косвенное измерение по теореме Пифагора | • | • | • | • |
| Сложение/вычитание расстояний | • | • | • | • |
| Продолжительное измерение расстояний | • | • | • | • |
| Измерение минимальных/максимальных расстояний | • | • | • | • |
| Подсветка и многострочный экран | • | • | • | • |
| Звуковой сигнал | • | • | • | • |
| Защита корпуса от пыли/брызг | IP54 | IP54 | IP54 | IP54 |
| Количество записей в памяти прибора | 20 | 20 | 20 | 20 |
| Тип клавиатуры | с мягким прикосновением и длительным сроком службы | с мягким прикосновением и длительным сроком службы | с мягким прикосновением и длительным сроком службы | с мягким прикосновением и длительным сроком службы |
| Рабочая температура | -10 до 50°С (14 до 122°F) | -10 до 50°С (14 до 122°F) | -10 до 50°С (14 до 122°F) | -10 до 50°С (14 до 122°F) |
| Температура хранения | -20 до 60°С (-4 до 140°F) | -20 до 60°С (-4 до 140°F) | -20 до 60°С (-4 до 140°F) | -20 до 60°С (-4 до 140°F) |
| Относительная влажность | <95% (без учета конденсации) | <95% (без учета конденсации) | <95% (без учета конденсации) | <95% (без учета конденсации) |
| Влажность при хранении | 30-50% | 30-50% | 30-50% | 30-50% |
| Срок службы элементов питания | до 4000 измерений | до 4000 измерений | до 4000 измерений | до 4000 измерений |
| Элемент питания | тип ААА 2×1,5В | тип ААА 2×1,5В | тип ААА 2×1,5В | тип ААА 2×1,5В |
| Автоматическое выключение лазерного целеуказателя | через 0,5 минуты |
| Автоматическое выключение прибора | через 3 минуты |
| Размеры | 110×46×28 мм |
| Вес | 100 г |
* Необходимо воспользоваться мишенью для увеличения расстояния измерения в дневное время суток или в том случае, если объект имеет низкий коэффициент отражения! ** при благоприятных условиях (отражающие свойства поверхности объекта, температура воздуха) до 10 м (33 футов). В неблагоприятных условиях, например, при сильном солнечном свете, слабом отражении от поверхности объекта или высоком колебании температур отклонение результатов измерения на расстоянии свыше 10 м (33 фута) может увеличиться на ±0,15 мм/м (±0,0018 дюймов/фут).
Компания CEM предоставляет лазерные дальномеры LDM-100H с полным набором комплектации, в который входят: лазерный дальномер, батарейки 1,5в тип ААА 2шт, фирменный чехол с креплением на пояс, ремешок, отвертка, винт, инструкция по экслуатацииГарантия: 24 мес.
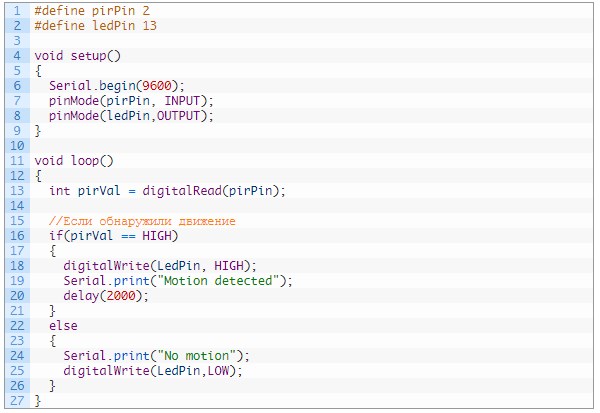
Принцип работы ИК датчика
Инфракрасные датчики могут иметь различную конструкцию, а принцип работы таких устройств может отличаться в зависимости от способа регистрации инфракрасного излучения. В такие приборы могут устанавливаться активные или пассивные ИК-элементы, а также комбинация этих двух типов детекторов ИК-излучения.
Активные
Работа активных датчиков похожа на систему радарного обнаружения самолётов, но только в инфракрасном диапазоне. Система этого типа состоит из двух основных элементов: генератора и приёмника ик-излучения. Первый элемент излучает сигнал в инфракрасном диапазоне, а второй — обрабатывает отражённый сигнал.
Если в зоне действия системы этого типа появляется какое-либо движение, то происходит доплеровский сдвиг частоты, на который и реагирует приёмник сигнала. Благодаря высокой степени чувствительности таких сенсоров они получили большее распространение, но по этой же причине такие устройства часто срабатывают ложно, например, при качании ветвей деревьев во время сильного ветра.
Пассивные
Пассивные устройства состоят только из приёмников сигнала. Излучателя в таких приборах нет, но благодаря высокой чувствительности сенсоров и применению линзы Френаля, удаётся добиться высоких результатов по обнаружению инфракрасного излучения, как в помещениях, так и на открытых площадках. Оптическая система разбивает детектируемое пространство на большое количество отдельных частей, что позволяет электронной системе сопоставлять уровень ИК излучения, исходящего из разных точек пространства. При обнаружении значительных расхождений в уровне излучения прибор срабатывает, и сигнал о наличии движения передаётся в систему звукового оповещения.
В качестве сенсора в пассивных устройствах используются пироэлектрические преобразователи. В приборе применяется чётное количество полупроводниковых элементов. Это необходимо, чтобы разделить между собой сигнал, поступающий от различных секторов линзы.
Комбинированные
В комбинированных инфракрасных системах применяются одновременно активный и пассивный датчики. Таким образом значительно снижается количество ложных срабатываний, ведь для включения электрического света, сирены сигнализации или других устройств необходимо получить «добро» от обоих сенсоров.
Комбинированные инфракрасные детекторы не лишены недостатков. Если по тем или иным причинам, какой либо датчик не сработает при наличии движения в зоне действия устройства, то подобные действия не приведут к срабатыванию охранной или пожарной системы.
Диаграмма направленности
Диаграмма направленности для этих всех моделей дальномеров Sharp довольно схожа. В основном, диапазон измерений колеблется от 10 см до 80 см, а «угол зрения» таков, что его можно представить примерно в виде конуса с диаметром в средней его части около 16 см(по другим документам 6см для GP2D12 и 12см для GP2Y0A21). В связи с тем, что диаграмма направленности достаточно узкая, рекомендуется установка дальномера на вращающуюся платформу с сервомашинками для сканирования окрестностей. Это позволяет расширить угол обзора и исследовать пространство более детально. Дальномер будет вращаться на манер радара, сообщая о наличии объектов в определенном секторе на определенном удалении от платфоромы.
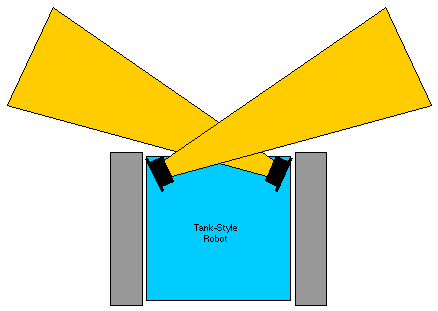
При использовании дальномеров в роли бампера необходим наиболее широкий луч излучения для охвата наибольшей зоны перед роботом. Типовое решение — это применение 2х дальномеров, установленных перекрестно (см. рисунок ниже). Наиболее часто применяется для этой цели GP2D15.
В зависимости от типа используемого дальномера, выход с них можно объединять для экономии портов ввода-вывода на микропроцессоре.
Скетч для компьютера
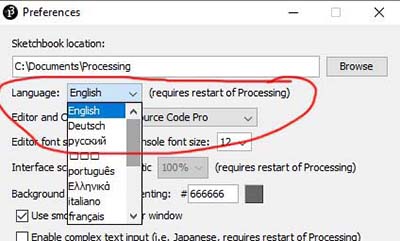
Для визуализации используется приложение Processing, скачать его можно по следующей
. Запустив среду Processing можно переключить языка интерфейса на русский. Для этого в меню нажмите «File», затем » Preferences…» и в открывшемся окне можно будет переключить язык:
Если при запуске появится сообщение, что не найдено Android SDK:
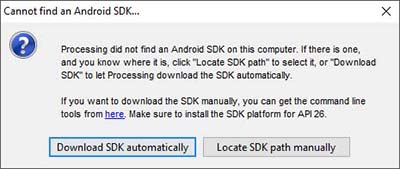
можно проигнорировать это сообщение и просто закрыть окно, нажав на крестик. Только при когда отобразиться окно программы, нужно будет переключить среду Processing из режима работы «Android» в режим «Java». Для этого слева вверху нажмите на «Android»:
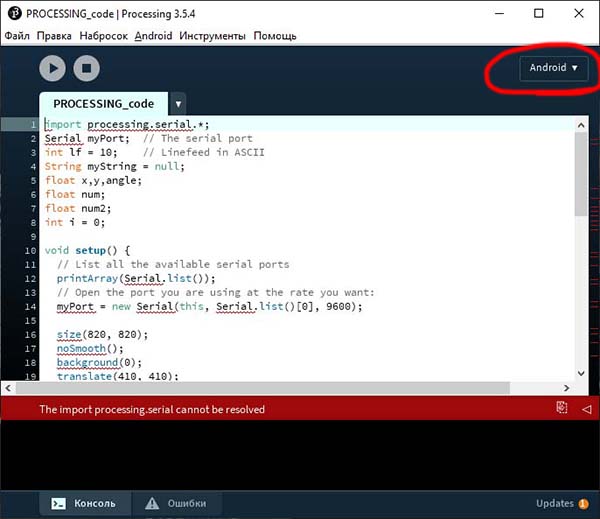
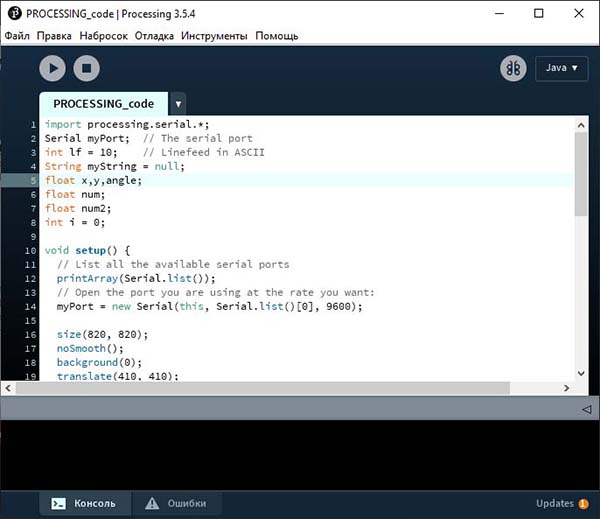
И в появившемся меню выберете пункт «Java»:
После чего среда автоматически перезапустится:
Создайте новый скетч (файл -> создать) и скопируйте в него скетч:
Одно из отличий Processing от Arduino IDE заключается в том, как выбирается последовательный порт. В Processing порт выбирается не в меню, а в коде по индексу массива. При запуске скетча, внизу окна выводится список портов:
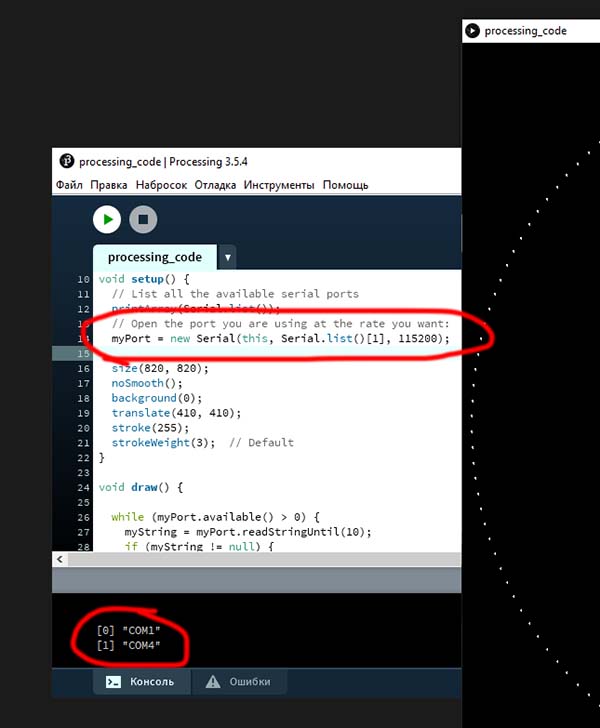
Найдите в списке порт, к которому подключена Arduino и в строчке:
myPort = new Serial(this, Serial.list(), 115200);
при необходимости поменяйте индекс. Если к примеру текущий порт «COM4», замените в коде ноль на единицу:
myPort = new Serial(this, Serial.list(), 115200);
https://vk.com/video_ext.php
Перевод: RobotoTehnika.ru
Виды датчиков
На рынке можно найти несколько основных видов датчиков расстояния, самыми популярными считаются:
ИК датчик — работает на основе испускаемого инфракрасного луча (лазера), высокоточное оборудование имеющие широкую сферу применения.Лазерный датчик расстояния работает таким образом: прибор посылает сигнал в виде лазерного луча, который отражается от стоящего перед ним препятствия и возвращается обратно в фотоэлемент. На основе того с какой скоростью вернулся сигнал, микроконтроллер вычисляет расстояние до препятствия. В зависимости от качества датчика, он может измерять дальность до нескольких сотен метров.
Ультразвуковой датчик — используется в основном для конструирования автоматических систем умного дома, так как имеет слишком большую погрешность для точных измерений.Ультразвуковой датчик расстояния в основном используется для обнаружения объектов и измерения расстояния до них. Принц работы устройства такой: прибор излучает звуковые колебания определенной частоты, при встрече с твердой поверхностью выпущенные звуковые волны возвращаются обратно в датчик. После чего микроконтроллер высчитывает расстояние до объекта по определенной формуле. Расстояние, на котором обнаруживаются объекты доходит до 8 метров, но с каждым метром снижается точность измерений
Также важно чтобы измеряемый объект имел гладкую поверхность.
Где используются датчики
В основном лазерные датчики расстояния используются в строительной сфере для замеров расстояния между объектами, но им можно найти множество применений. К примеру, датчики расстояния могут помочь в обустройстве умного дома. Установив и, настроив датчик определенным образом, можно автоматизировать включение и выключение света в комнате или сделать автоматическое открытие или закрытие дверей и так далее.
Также подобный датчик установлен в каждый современный смартфон, с его помощью выключается экран, как только смартфон близко подносится к уху во время разговора. Датчики расстояния часто устанавливают в капот и бампер машины, чтобы облегчить парковку и получать данные о препятствиях на пути автомобиля в реальном времени.
Данные датчики измерения расстояния можно приобрести в отдельном виде, но без программируемого микроконтроллера они почти бесполезны. Поэтому покупать их по отдельности разумно только для решения узкого спектра задач. Для подключения датчиков обычно используется микроконтроллер «Ардуино», который необходимо вручную настраивать и прошивать для работы с определенным типом датчиков.
Для тех, кто не хочет углубляться в основы программирования платформы «Ардуино» и радиотехники, рекомендуется купить готовый вариант в виде строительного дальномера.
Примеры скетчей
После установки библиотеки датчика VL53L0X становится доступно пару примеров скетчей, которые показывают, как использовать библиотеку.
Вы можете получить к ним доступ из IDE Arduino, открыв меню:
Файл -> Примеры -> VL53L0X
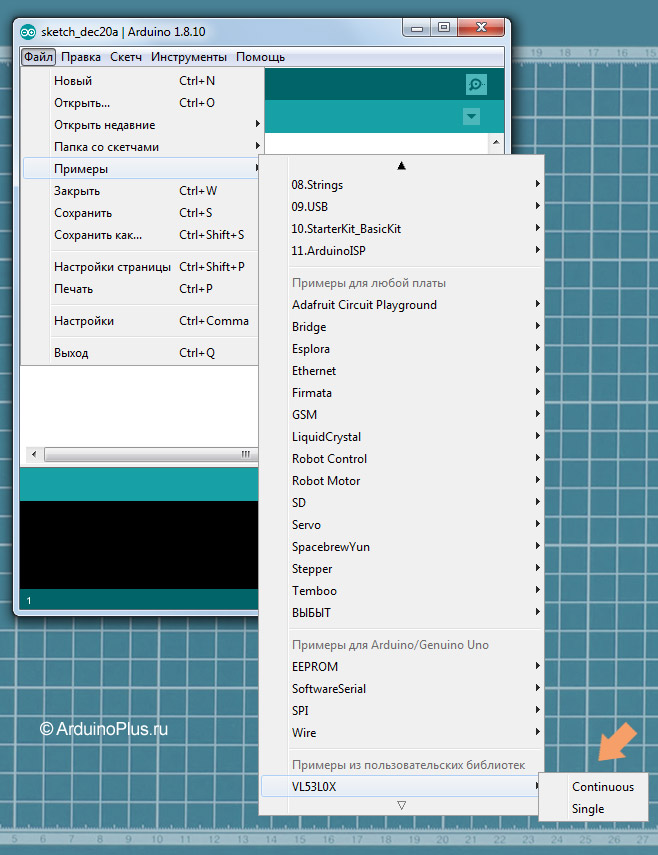
Я приведу код примеров ниже. Если вы не можете найти эти примеры, библиотека, вероятно, была установлена неправильно, и вам следует повторить приведенные выше инструкции по установке.
Пример №1
Первый пример показывает как использовать непрерывный режим для измерения дальности с помощью VL53L0X. Он основан на vl53l0x_ContinuousRanging_Example.c из API VL53L0X.
Показания диапазона приведены в миллиметрах.
Если вы просто скопируете код ниже, то не забудьте, что вам нужно установить две библиотеки для корректной работы — Wire.h и VL53LOX.h.
#include <Wire.h>
#include <VL53L0X.h>
VL53L0X sensor;
void setup()
{
Serial.begin(9600);
Wire.begin();
sensor.setTimeout(500);
if (!sensor.init())
{
Serial.println("Не удалось обнаружить и инициализировать датчик!");
while (1) {}
}
// Запустите непрерывный режим (снимайте показания
// как можно быстрее). Чтобы вместо этого использовать непрерывный синхронизированный режим,
// укажите желаемый период между измерениями в мс
// (например, sensor.startContinuous(100)).
}
void loop()
{
Serial.print(sensor.readRangeContinuousMillimeters());
if (sensor.timeoutOccurred()) { Serial.print(" ТАЙМАУТ"); }
Serial.println();
}
Пример № 2
Во втором примере показано, как получить одиночное измерение дальности с помощью VL53L0X. При желании датчик можно настроить с различными профилями измерения дальности. Подробнее можно посмотреть в руководстве пользователя API VL53L0X, чтобы повысить производительность для определенного проекта. Код основан на четырех примерах «SingleRanging» из API VL53L0X.
Показания диапазона приведены в миллиметрах.
#include <Wire.h>
#include <VL53L0X.h>
VL53L0X sensor;
// Раскомментируйте строку ниже, чтобы использовать дальний режим.
// Это увеличивает чувствительность датчика и расширяет его потенциальный диапазон,
// но увеличивает вероятность получения неточных показаний
// из-за отражений от объектов, отличных от намеченной цели.
// Лучше всего работает в темноте.
//#define LONG_RANGE
// Раскомментируйте одну из двух строк ниже, чтобы получить:
// - более высокую скорость за счет меньшей точности ИЛИ
// - более высокую точность за счет меньшей скорости
//#define HIGH_SPEED
//#define HIGH_ACCURACY
void setup()
{
Serial.begin(9600);
Wire.begin();
sensor.setTimeout(500);
if (!sensor.init())
{
Serial.println("Не удалось обнаружить и инициализировать датчик!");
while (1) {}
}
#if defined LONG_RANGE
// понижает предел скорости обратного сигнала (по умолчанию 0,25 MCPS (мчип/с))
sensor.setSignalRateLimit(0.1);
// увеличить периоды лазерного импульса (по умолчанию 14 и 10 PCLK)
// * - PCLK — это частота периферии
sensor.setVcselPulsePeriod(VL53L0X::VcselPeriodPreRange, 18);
sensor.setVcselPulsePeriod(VL53L0X::VcselPeriodFinalRange, 14);
#endif
#if defined HIGH_SPEED
// уменьшить тайминг до 20 мс (по умолчанию около 33 мс)
sensor.setMeasurementTimingBudget(20000);
#elif defined HIGH_ACCURACY
// увеличить тайминг 200 мс
sensor.setMeasurementTimingBudget(200000);
#endif
}
void loop()
{
Serial.print(sensor.readRangeSingleMillimeters());
if (sensor.timeoutOccurred()) { Serial.print(" ТАЙМАУТ"); }
Serial.println();
}
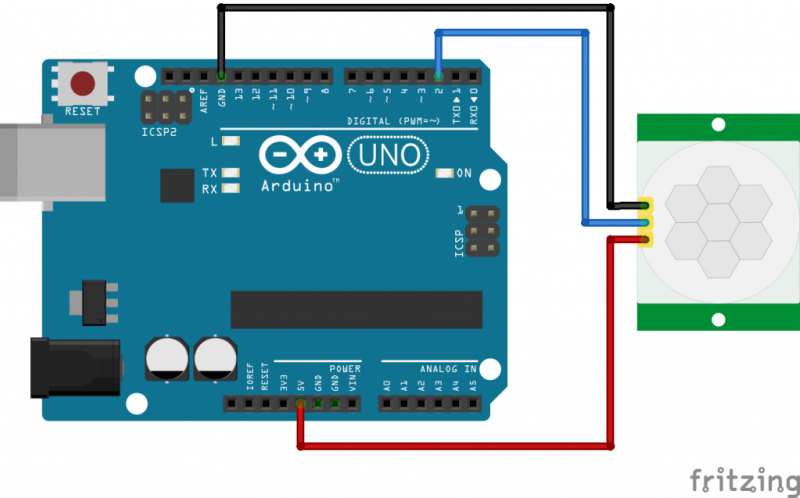
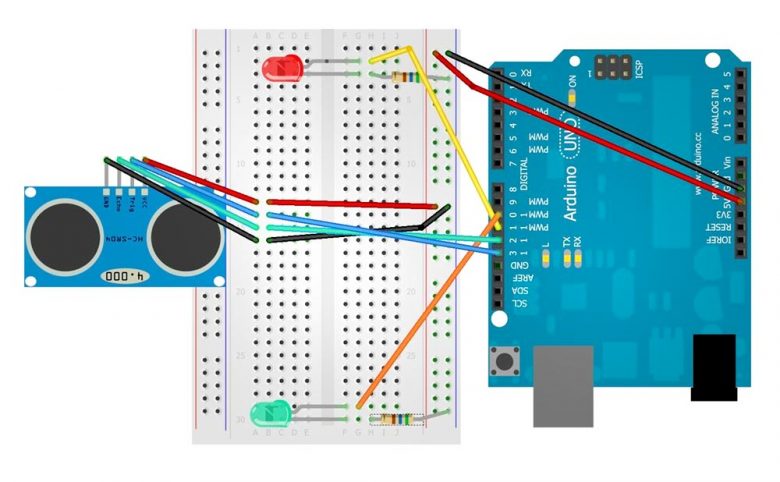
Схема
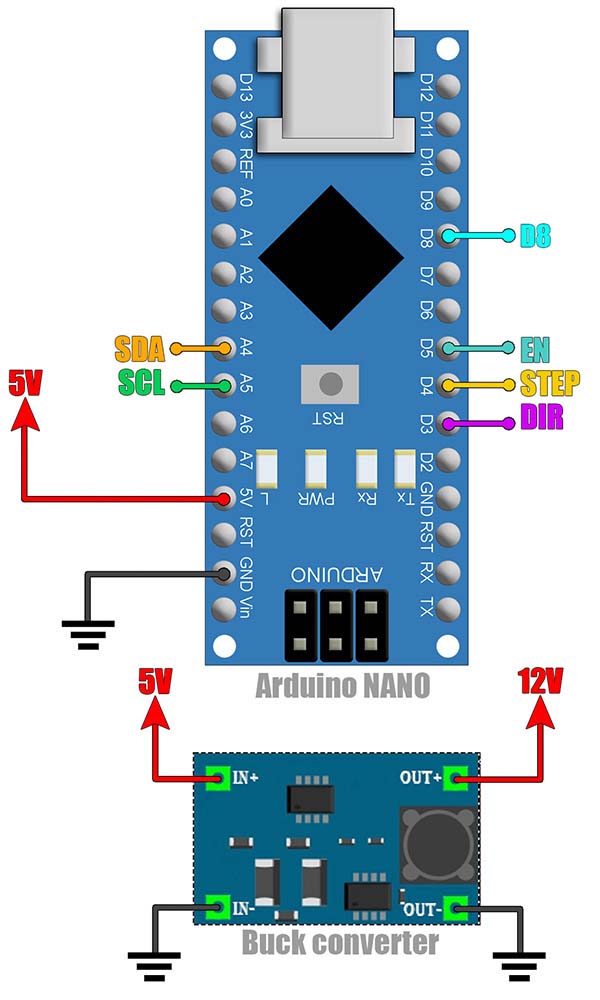
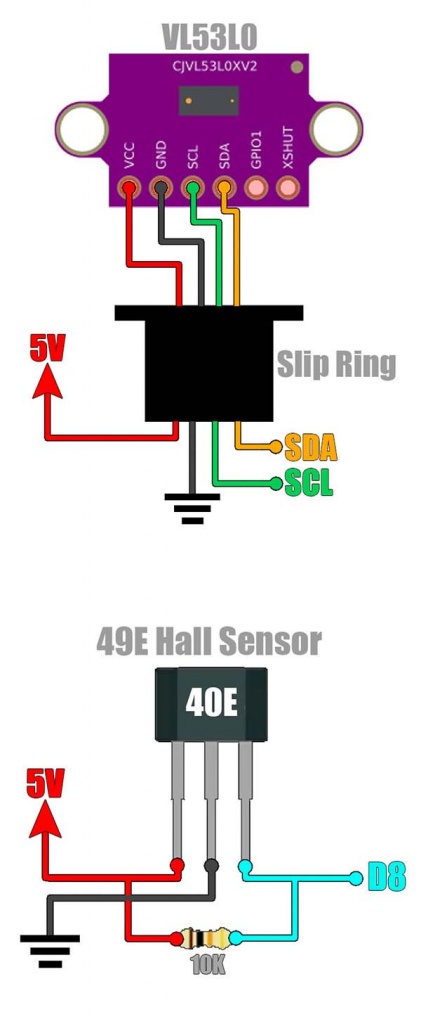
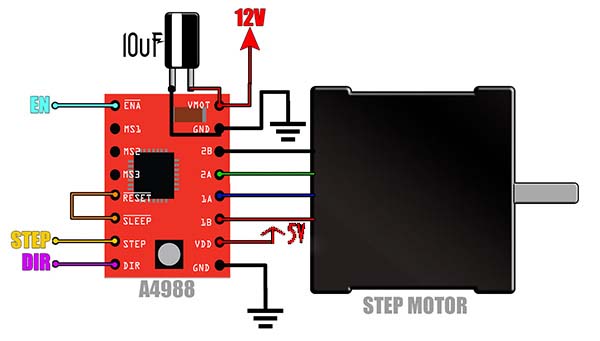
Схема проста, часть деталей запаивается на макетной плате.
Через скользящие контакты от Arduino к датчику VL53L03X подключаются контакты +5В, земля и две линии интерфейса I2C (SCL и SDA). К датчику Холла подключается земля, +5В и вывод D8 от Arduino. Также между +5В и D8 устанавливается резистор на 10кОм.
На повышающего преобразователя подаётся 5В. На плате построечным резистором устанавливается выходное напряжение примерно 12В. Эти 12В с выхода стабилизатора подключаются к выводам «питание мотора» модуля драйвера моторов. Так же по линии 12В устанавливается электролитический конденсатор, который нужен что бы драйвер мотора работал без сбоев (на плате его может не быть совсем, а даже когда запаян керамический или танталовый конденсатор, его ёмкости обычно недостаточно). 5В подключается к выводам «питание логики» драйвера моторов. Не перепутайте, где выводы «питание логики» и «питание мотора», иначе драйвер может выйти из строя.
Платы бывают разные, иногда плюс питания для мотора обозначается, допустим надписью VMOT, а плюс питания логики обозначаться как VCC. Выводов GND на плате может быть один или несколько, в данном случае это не имеет значения.
Выводы STEP, DIR и EN от драйвера моторов подключаются к Arduino, а выводы RESET и SLEEP соединяются между собой.
На платах с драйвером моторов A4988 обычно запаян подстроечный резистор, им настраивается ограничение по току для шагового мотора. Ограничение тока для шаговых моторов очень желательно настроить. Если ограничить ток слишком сильно, мотор под нагрузкой или не сможет вообще проворачивать вал или будут пропуски шагов. Если задать слишком большой ток и источник питания способен будет его обеспечить, мотор будет греться или его обмотки просто сгорят. Так же это абсолютно ненужная нагрузка на источник питания. При питании от аккумулятора это приведёт к тому, что он будет быстрей разряжаться. При питании от USB (блока питания, порт компьютера или ноутбука и т.д.) в лучшем случае будет просто лишняя нагрузка, в худшем, когда блок питания или порт не рассчитан на такой ток и нет защиты, это даже может привести к выходу из строя блока питания или порта.
Вот и все. В качестве источника питания используется USB-кабель, подключенный к Arduino NANO.
Код проекта
Ниже вы можете скопировать скетч для нашего проекта и загрузить его на вашу плату Arduino Uno.
int laserPin = 3;
int sensorPin = A0;
int buttonPin = 12;
int buzzerPin = 11;
int laserThreshold = 10;
void setup() {
pinMode(laserPin, OUTPUT);
pinMode(buttonPin, INPUT_PULLUP);
Serial.begin(9600);
}
boolean alarmState = false;
void loop() {
if (! alarmState) {
delay(1000);
digitalWrite(laserPin, HIGH);
delay(10);
unsigned long startTime = millis();
while (millis() - startTime < 1000) {
int sensorValue = analogRead(sensorPin);
Serial.println(sensorValue);
if (sensorValue > laserThreshold) {
alarmState = true;
break;
}
delay(10);
}
digitalWrite(laserPin, LOW);
} else {
tone(buzzerPin, 440);
if (! digitalRead(buttonPin)) {
alarmState = false;
noTone(buzzerPin);
}
delay(10);
}
}
На этом всё.
Плюсы и минусы использования
Лазерные дальномеры широко используются в сфере строительства благодаря своим основным плюсам:
- Большая рабочая дальность. В зависимости от стоимости и типа, девайс способен почти без погрешности работать на расстояниях более сотни метров.
- Удобство юстировки. Данный плюс обусловлен тем, что лазерное пятно хорошо видно на любой поверхности.
- Защита от засветов. Испускаемый луч имеет узкий монохромный спектр, который исключает случайное срабатывание. Приемник сигнала будет реагировать только на попадание в него отраженного лазера.
- Защита от помех. Датчик функционирует только в импульсном режиме, поэтому на него не воздействуют условия внешней среды.
- Низкое потребление энергии. На одной зарядке датчик может произвести несколько сотен измерений.
К минусам можно отнести достаточно высокую стоимость даже простых моделей. Но обычные датчики без микроконтроллера стоят в несколько раз дешевле и при наличии навыков программирования и пайки можно собрать собственный дальномер.
Нелинейный выход
Выходная характеристика детекторов нелинейно (см. рисунок) зависит от измеренного расстояния.
Выходная характеристика дальномеров Sharp
График изображает типичную (например, для GP2Y0A21YK и GP2D12) выходную характеристику дальномеров Sharp.
Следует обратить внимание на две вещи:
Выходная характеристика дальномера (дистанция 10 см — 80см) нелинейна и близка к логарифмической. Эта кривая незначительно отличается от дальномера к дальномеру, поэтому можно «нормализовать» характеристику с помощью таблицы или функции. В этом случае, вы можете калибровать каждый дальномер, получая в результате линейную характеристику, независящую от дальномера к дальномеру.
В случае если дистанция меньше минимально измеряемой (на графике это 10 см) характеристика падает очень быстро и возникает впечатление что измерено далекое растояние. Это может ввести в заблуждение и даже повредить вашего робота, если он двигается с высокой скоростью. Простейший способ этого избежать — устанавливать дальномер на робота с учетом длины робота.
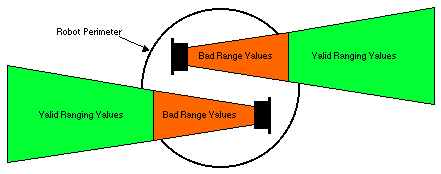 Пример перекрестной установки дальномера для компенсации минимального ограничения измерения.
Пример перекрестной установки дальномера для компенсации минимального ограничения измерения.
Инструменты
Чтобы лишний раз не бегать в магазин прямо посреди процесса сборки системы, лучше заранее подготовить все инструменты, что могут вам пригодиться. Так, стоит побеспокоиться, чтобы под рукой были:
- Паяльник. Хорошим выбором станут приборы с регулируемой мощностью, их можно приспособить к любой ситуации.
- Проводники. Естественно, датчик необходимо будет подсоединять к МК, и для этого не всегда подходят стандартные пины.
- Переходник под usb-порт. Если на вашем микроконтроллере нет встроенного порта, побеспокойтесь о том, чтобы его можно было подключить к ПК другим способом. Ведь вам необходимо будет подгружать дополнительные библиотеки и новую прошивку в ваш проект.
- Припой, канифоль и прочие мелочи, в том числе изолированное рабочее пространство.
- Сам чип и МК, а также, при необходимости, корпус будущего устройства. Наиболее опытные инженеры предпочитают распечатывать оболочку для своих проектов на 3Д принтере, однако, если вы живёте в крупном городе, не обязательно тратиться. Можете поискать компании, дающие в аренду принтеры.
Стоит понимать, что дальномер Arduino относится к приборам бесконтактного типа и способен обеспечивать точные измерения. Но всё же не стоит забывать, что профессиональные устройства используют совершенно другие технологии и проходят длительную калибровку под все материалы, а соответственно, в любом случае, окажутся лучше. Также у нашего проекта будет ограниченный диапазон измерения расстояний, от 0.03 до 4 метров, что подойдёт не во всех случаях.
Но, что хорошо, на работу устройства не оказывается никакого влияния со стороны ЭМ излучений и солнечной энергии. А в комплекте к датчику уже находятся нужные ресиверы и трансмиттеры, которые пригодятся, когда вы будете собирать ультразвуковой дальномер Ардуино.
Важно! В нашем уроке можно будет ничего не паять, т.к. мы будем использовать макетную плату и провода-перемычки
Но если вы захотите в итоге собрать законченное устройство — вам пригодится всё что мы указали выше.
Разновидности датчиков
Разновидности датчиков
Не смотря на одинаковый принцип действия, их назначение может быть разным, в зависимости от условий эксплуатации. Поэтому, выбирая датчик, следует в первую очередь определиться с тем, где он будет установлен.
Устройства, предназначенные для установки на открытом воздухе, выполняются в более защищенном корпусе, тем более, если они работают от сети 220V. Степень защиты помечается двумя буквами (IP) и цифрами. Так, для эксплуатации вне помещения следует выбирать электрооборудование, имеющее степень защиты IP 55 и не ниже, а в случае установки внутри помещения – с пометкой до IP 55.
Выбор по типу питания
В зависимости от конструкционных особенностей, датчики работают:
- От сети, напряжением 220 V.
- От гальванических элементов питания (батареек или аккумуляторов).
Наиболее востребованными считаются устройства, работающие от напряжения 220 V, то есть проводные. Меньший спрос на датчики, которые работают от батареек или аккумуляторов, но в последнее время все больше отдают предпочтение независимым источникам питания. К тому же, бывают случаи, когда необходим именно беспроводной датчик движения, работающий от солнечной батареи, например.
Принцип действия датчика движения
Принцип работы датчиков движения может быть различным. Поэтому различают:
- Инфракрасные датчики движения, которые реагируют на тепло, излучаемое теплокровными существами. Представляют пассивные устройства, поскольку сами никаких сигналов не излучают, а только реагируют на них. Такие типы датчиков реагируют не только на появление человека, но и на движения животных.
- Акустические датчики, реагирующие на звуковые сигналы. Это также пассивные устройства, которые включают различные устройства от хлопка руками или от звука открывающейся двери и т.д. Их удобно устанавливать в подвалах частных домов или городских квартир. Как правило, в подвалах появляется шум только тогда, когда в него кто-то заходит. Что касается других условий эксплуатации, то нужно хорошо подумать.
- Микроволновые датчики движения. Это уже группа активных устройств, поскольку датчики движения сами генерируют микроволны и сами их отслеживают. Если в их «поле зрения» появляется движущийся объект, то они включают сигнализацию, как световую, так и звуковую. Чувствительные модели таких устройств могут контролировать помещения, находящиеся за перегородками. Как правило, подобные типы датчиков применяются в охранных системах.
- Ультразвуковые датчики отличаются от микроволновых только диапазоном излучаемых сигналов. Используются не так часто, поскольку на него могут реагировать животные. Длительное излучение ультразвука может также негативно сказаться на здоровье человека.
- Комбинированные, в которых заложено несколько принципов реагирования на движущиеся объекты. Эти устройства считаются наиболее надежными, но и стоят они гораздо дороже.
Как правило, в основном используются инфракрасные датчики, поскольку это недорогие устройства, а их радиус действия устраивает потенциальных покупателей. К тому же, датчики оборудованы регуляторами для более точной настройки. Ультразвуковые и микроволновые датчики лучше устанавливать в длинных коридорах или на лестницах, поскольку у них гораздо больше радиус действия. Для охраны важных объектов лучше подойдут микроволновые датчики, тем более что они способны обнаружить движущийся объект даже за перегородкой.
Датчик Движения. Схема подключения датчика движения. Как самостоятельно подключить датчик движения.
Watch this video on YouTube
Что такое дальномер
Дальномер — это компактный девайс, который пришел на смену строительным рулеткам. Данный прибор способен моментально выполнить точные замеры, проводить сложные расчеты, но главный плюс — это то, что его может использовать один человек, без помощи напарника, который держит один конец рулетки.

Существует множество формфакторов и вариантов исполнения данного девайса, но обычно это небольшое устройство, которое помещается в ладонь. Дальномер имеет встроенный аккумулятор что позволяет ему работать долгое время без подзарядки. На корпусе устройства расположен дисплей, на который выводится основная информация о текущем состоянии устройства, а также о результатах замеров. На торце имеется излучатель и приемник, благодаря которым осуществляются измерения.
Лазерные дальномеры активно используются в строительстве и во время монтажных работ. Устройство способно проводить точные измерения с погрешностью 1–3 мм на 10 метров, в зависимости от технических характеристик модели.
Дальномеры делятся на две группы:
- Активные модели — определяют расстояние при помощи звукового, лазерного или светового луча. После выпуска луча он отражается от препятствия и направляется обратно в дальномер. Датчик, который улавливает сигнал проводит вычисления, и выдает результат на дисплей.
- Пассивные модели — работают на основе формулы равнобедренного треугольника, где нужное расстояние это высота h, а длина основания неизвестна. Пассивные устройства активно используются в геодезии, спорте, охоте и там, где минимальные измерения начинаются от 0.5 км и могут доходить до нескольких километров. Для работ, где важна точность измерений вплоть до сантиметра такие устройства не подходят.
Приобретать дальномеры нужно в зависимости от того для какой деятельности он будет использоваться.
Подключение датчика HC SR04
С подключением датчика не должно возникнуть никаких проблем. Достаточно с помощью проводников соединить пин на питание с источником или МК, а ввод и вывод, соответственно, присоединить непосредственно к МК. Воспользуйтесь схемой ниже для сборки схемы:
У самого сенсора SR04 следующие характеристики от которых вам стоит отталкиваться:
- Напряжение для питания – 5В.
- Работает в цепях с силой тока 15 мА.
- Если датчик не используется, то для поддержания его в пассивном состоянии всё ещё требуется до 2 мА.
- Угол обзора у модуля небольшой, всего 15 градусов.
- Разрешение сенсора – 3 десятых см.
- А вот угол для измерений составляет уже приятные 30 градусов.
Также на датчике имеются четыре вывода по стандарту 2.54 мм. В них входит контакт для питания с положительным напряжением +5В, пины для ввода и вывода сигнала и заземление.
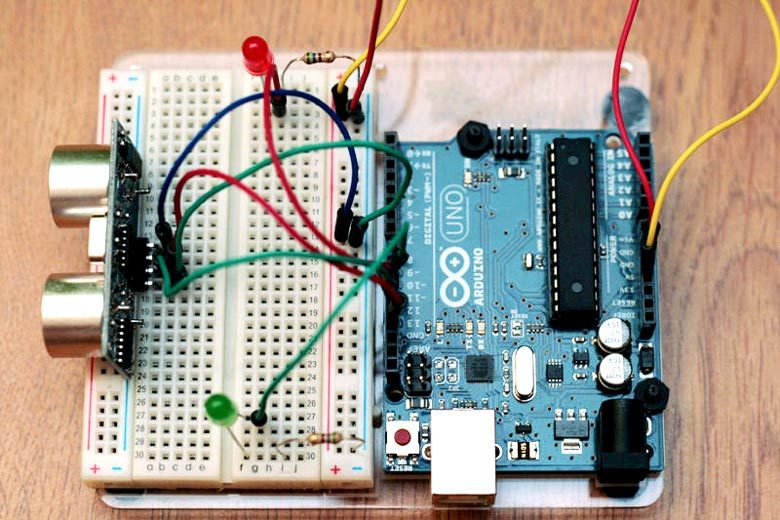
В конечном варианте выглядеть устройство должно примерно таким образом:
Принцип работы ультразвукового дальномера
Принцип действия ультразвукового дальномера.
Дальномер ультразвуковой работает путем направления испускаемого звука на какой-то предмет, который, в свою очередь, отражает его. Дальномер улавливает приемным блоком. Этот ультразвук не слышим окружающим. Скорость звука напрямую зависит от плотности воздуха, что способствует более точному расчету расстояния.
В процессе внедрения новых технологий и производственных возможностей конструктора добились усовершенствования конструкции аппарата. Это позволило создать новый прибор, более точно направленный звуковым пучком. Был создан ультразвуковой дальномер с лазерной указкой. Такой аппарат значительно увеличил точность измерений и облегчил проведение работ.
Приобрести ультразвуковой дальномер на сегодня можно на любых торговых точках, занимающихся измерительными приборами.
Такой аппарат имеет значительные недостатки. Главным минусом является точность замера, так как она определяется с учетом окружающей среды, в которой будет распространяться звук. Параметры и значения (главным из которых является плотность) не могут быть постоянными и имеют способность изменяться в период работ. Немаловажным недостатком считается и ограничение длины измерений, так как пределы расстояния – от 30 см до 20 м.
В связи с этим использовать ультразвуковые приборы можно в том случае, когда не требуется точных замеров и замеров не более допустимых пределов. В иных случаях лучше приобрести дальномер лазерный, хотя он стоит немного дороже, но имеет лучшие технические характеристики.