Робот-манипулятор на arduino
Содержание:
- Особенности и преимущества механической руки-манипулятора
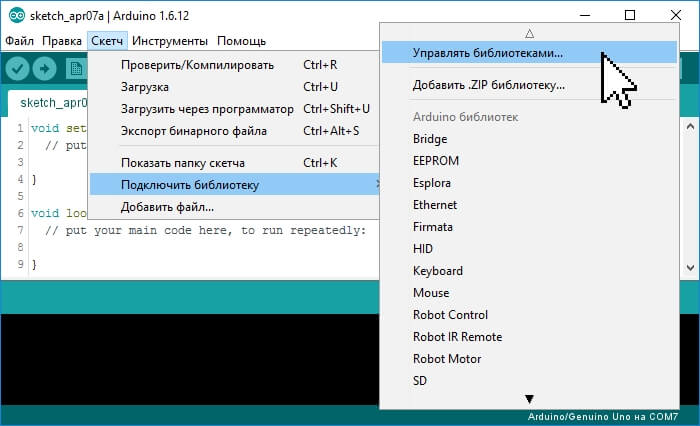
- Шаг 12. Код Arduino
- Популярные модели
- Как работает простая конструкция блоков
- Сборка механической части
- Как сделать кран для подъёма шлака, опилок и песка
- ТОП-2: Kinova JACO Robot Manipulator (Research Edition)
- Назначение роботов
- Отделка и сборка
- Сборка в общих чертах
- Скетч с использованием ультразвукового датчика расстояния
- Шаг 10. Схема подключения
- Пробы и ошибки
- Электросхема
- ТОП-1: Advanced Robotic Manipulator (ARM 2.0) — Closed Loop
- Основные характеристики
- Применение
- Электроника
Особенности и преимущества механической руки-манипулятора
Робот может работать 24 часа в сутки без отдыха. Ему не нужны перерывы и кофе. Без современных манипуляторов ни одно высокотехнологичное производство не могло бы работать с такой эффективностью. Все манипуляторы делятся на три типа. Существуют полностью автоматические модели, управляемые внутренней программой и дистанционные аналоги. Третий тип — комбинированные устройства.
Среди самых важных преимуществ механической руки-манипулятора можно выделить:
- высокую грузоподъёмность,
- сверхточное позиционирование,
- количество степеней свободы, зависящих лишь от числа рабочих звеньев.
Некоторые конструкции могут состоять из двух и даже трёх рук, работающих от одного вычислительного блока. Основа может быть подвижной или статичной. В первом случае робот для передвижения использует гусеницы или колёса, во втором — направляющий рельс.
Шаг 12. Код Arduino
Загрузите скетч файл Arduino.
Подключите USB-кабель к USB-порту вашего компьютера и загрузите код. Загрузка кода занимает время, Вам нужно проявить терпение.
После полной загрузки, отсоедините USB-кабель, подключите источник питания к Arduino и включите кнопку питания. Код начнет работать моментально.
Вам, возможно, придется заменить начальный угол каждого серводвигателя в зависимости от того, как Ваши сервоприводы монтируются.
Объяснение кода:
Перед установкой кода импортируте библиотеки, используемые в эскизе (nunchuk.h, wire.h и servo.h).
Далее определяются используемые контакты и объявляются глобальные переменные. Целочисленные переменные angle# (угла) сохраняют начальную позицию для каждого сервопривода. Если Вы хотите, чтобы Ваш робот начал работать в другой позиции, измените значения этих переменных.
Переменные servo # _speed определяют скорость движения каждого сервопривода. Если вы хотите, чтобы определенный сервопривод двигался быстрее, увеличьте его значение. Угол # min и угол # max используются для ограничения максимального и минимального угла для каждого сервопривода. Вы можете установить эти переменные, чтобы избежать коллизий между последовательными суставами робота.
Во время настройки каждый сервопривод подключается к определенному выводу, и его положение запускается.
Здесь также запускается последовательная связь (с последовательным монитором) и связь I2C с Nunchuck.
Основной цикл повторяется снова и снова. Статус Nunchuk читается в каждом цикле. В зависимости от показаний выполняются разные команды.
Джойстик X будет использоваться для перемещения серво #1.
Был использован следующий блок кода. Сначала он проверяет, достаточно ли значение джойстика. Таким образом, шум и небольшие вариации не учитываются. Если значение соответствует требованиям, угол сервомашины будет увеличен / уменьшен с заданной скоростью.
Аналогичный блок используется для джойстика Y. Он используется для изменения угла Серво #3. Серво #2 сохраняется в этом коде.
Вращение захвата задается углы рулона и тангажа контроллера, измеренные его акселерометром. Чтобы облегчить управление рукой, угол захвата обновляется только при нажатии кнопок C или Z.
Когда нажимается только кнопка C, код считывает угол поворота и использует его как заданное значение. Серво #5 вращается до достижения заданного значения. Это скорость пропорциональна ошибке между фактическим и желаемым положением. Аналогичный код используется для сервоуправления №4, который отслеживает угол наклона контроллера.
Захват закрывается всякий раз, когда нажимаются кнопки C и Z. Когда какая-либо из этих кнопок будет не нажата, манипулятор откроет захват.
К концу эскиза есть блок кода. Он отобразит на Serial Monitor фактический угол каждого сервомотора. Может быть полезно выбрать начальный угол каждого двигателя.
Популярные модели
Краны-манипуляторы производятся в:
- Японии.
- Китае.
- России.
- Германии.
- Италии.
- Корее.
Выбрать модель силовой установки можно из таких торговых марок ведущих мировых производителей:
- Atlas;
- Amco Veba;
- Effer;
- Hiab;
- Ferrari;
- Fassi;
- Palfinger epsilon;
- Unik;
- Isuzu;
- Foton;
- XCMG;
- Атлант;
- БАКМ;
- Велмаш.

Установки Foton имеют показатель грузоподъемности 6 т, а их длина — больше 6 м. Foton Олли перевозит грузы и полезен в строительных работах.
Кран-манипулятор Hiab 600EP5HiPro поднимает грузы до 16 т. Его можно использовать для перемещения крупно- и негабаритных грузов. Оснащен пультом для дистанционного управления. Данное устройство способно поднимать грузы, которые расположены возле его колес.
Мини-кран перемещает груз весом до 3 т. Популярные модели:
- СОРОКИН 8.10.
- АЕ&Т 1т Т62201.
- АЕ&Т 1т Т62101.
- СОРОКИН 8.6.
- СОРОКИН8.2.
- СОРОКИН 8.22.
- СОРОКИН 8.3.

Подходящая крановая установка на Газель должна поднимать вес 800 кг. Это такие модели:
- РМ 3622 СЕ, производитель — Италия, монтируется за кабиной;
- Unik URA — 100, производитель — Япония, монтируется внутри бортовой платформы.
Газель с КМУ подходит для транспортировки крупногабаритных и легких грузов, а также для погрузочно-разгрузочных работ.
Это интересно: Технические и грузоподъемные характеристики крана Юргинец КС-4361 — изучаем со всех сторон
Как работает простая конструкция блоков
Система блоков или полиспаст известна человечеству с древнейших времён. Классическая конструкция системы состоит из шкивов и троса. Один шкив называют блоком. В зависимости от способа крепления шкив может быть подвижным и неподвижным:
- Неподвижный блок. Крепится к опоре и играет роль изменения направления движения каната. Не даёт никакого выигрыша в силе.
- Подвижный блок. Располагается на стороне груза и даёт выигрыш в силе.
Принцип работы полиспаста схож с принципом работы рычага в физике простых механизмов. Роль рычага в этом случае играет сам трос. В случае простого блока из двух шкивов, подвижный шкив делит верёвку на 2 части и для того, чтобы поднять груз на то же расстояние, потребуется канат в 2 раза длиннее. Работа по поднятию груза выполняется в том же объёме. А усилие, из-за того, что длина верёвки стала в два раза больше, становится в два раза меньше.
В случае если в системе более 2-х шкивов, выигрыш в силе примерно равен количеству блоков. В случае 3-х блоков, усилие будет в 3 раза меньше, а 4 блока потребуют лишь четверть от первоначального усилия.
Сборка механической части

Перед началом разработки механической части манипулятора, стоит отметить, что чертежей у меня нет. Все узлы делались «на коленке». Но принцип очень простой. У вас есть два звена из акрила, между которыми надо установить серводвигатели. И другие два звенья. Тоже для установки двигателей. Ну и сам схват. Подобный схват проще всего купить в интеренете. Практически все устанавливается с помощью винтов.
Длина первой части около 19 см; второй — около 17.5; длина переднего звена около 5.5 см. Остальные габариты подбирайте в соответсвии с размерами вашего проекта. В принципе, размеры остальных узлов не так важны.
Механическая рука должна обеспечивать угол поворота 180 градусов в основании. Так что мы должны установить снизу серводвигатель. В данном случае он устанавливается в тот самый диско-шар. В вашем случае это может быть любой подходящий бокс. Робот устанавливается на этот серводвигатель. Можно, как это показано на рисунке, установить дополнительное металлическое кольцо-фланец. Можно обойтись и без него.
Для установки ультразвукового датчика, используется акрил толщиной 2 мм. Тут же снизу можно установить светодиод.
Детально объяснить как именно сконструировать подобный манипулятор сложно. Многое зависит от тех узлов и частей, которые есть у вас в наличии или вы приобретаете. Например, если габариты ваших сервоприводов отличаются, звенья арма из акрила тоже изменятся. Если изменятся габариты, калибровка манипулятора тоже будет отличаться.
Вам точно придется после завершения разработки механической части манипулятора удлинить кабели серводвигателей. Для этих целей в данном проекте использовались провода из интернет-кабеля. Для того, чтобы все это имело вид, не поленитесь и установите на свободные концы удлиненных кабелей переходники — мама или папа, в зависимости от выходов вашей платы Arduino, шилда или источника питания.
После сборки механической части, мы можем перейти к «мозгам» нашего манипулятора.
Как сделать кран для подъёма шлака, опилок и песка
ed_hanowУчастник FORUMHOUSE
Я строю дом. Стараюсь обходиться без помощников. Хочу засыпать чердачное перекрытие утеплителем — 20 кубов опилок и 10 кубов шлака. Возраст уже не тот, чтобы бегать туда-сюда с вёдрами. Решил изготовить разборный автоматический подъёмник для сыпучих материалов. И вот, что у меня получилось.
Чтобы сделать самодельный подъёмник вам нужны:
- Электрический тельфер мощностью 0.9 кВт с максимальной грузоподъёмностью 500 кг.
- Корыто или кузов от садовой тачки грузоподъёмностью 250 кг.
- 12-я стальная двутавровая балка.
- 8 шт. подшипников для роликов.
- Электрический кабель.
Сначала изготовьте каретку. Как она устроена, видно на фото.
Закрепите балку, на торце которой приварена ограничительная пластина и кронштейн ролика движения каретки.
Внутренний ограничитель (упор для каретки на чердаке) разъемный. Тельфер в сборе с кареткой загоняется на двутавровую балку, после чего прикручивается ограничитель.
Важно! Балка установлена с уклоном 3 см на 1 погонный метр. За счёт этого каретка с грузом сама заезжает на чердак
Обратно на торец балки каретка вытягивается верёвкой, перекинутой через ролик.Эта же верёвка удерживает каретку, чтобы груз, после подъёма, бесконтрольно не поехал к месту разгрузки.
Тельфер ставится в горизонтальное положение. Уровень пользователь отрегулировал набором граверных шайб.
К балке приварены держатели струны, на которой закреплён электрический кабель.
Важно! Кабель подвижен. Подъёмник работает так:
Подъёмник работает так:
- Загружаете корыто сыпучкой.
- Поднимете груз наверх.
- Загоняете корыто на место разгрузки.
- Для разгрузки, опустите корыто на перекрытие. Замки подъёмника автоматически отсоединяются.
- Произведите разгрузку.
- Вытяните каретку с помощью верёвки на торец двутавра.
- Опустите корыто вниз.
- Закрепите замки.
- Загрузите корыто.
- Повторите операцию.
ed_hanowУчастник FORUMHOUSE
Подъёмником я загрузил на чердак 12 кубов шлака. Устройство отработало на ура. Ни одной поломки. Разобрал и положил его для следующего строительства.
Подъёмник понравился участникам портала и у них появились вопросы к ed_hanow.
Valery22Участник FORUMHOUSE
Интересуюсь:
- Почему не использовали стандартную каретку? Ограничение по высоте?
- На сколько выгоден этот механизм? Не дешевле нанять пару разнорабочих. Сделать блок и поднять на второй этаж груз на верёвке? Думаю, дня за 3, управились бы. Опилки ещё легче. Можно и по лестнице в мешках потаскать.
ed_hanowУчастник FORUMHOUSE
Отвечаю по пунктам:
- В продаже не было нужной мне каретки. Те, чтобы были, дорогие и их нужно переделывать.
- Ограничение по высоте есть. От перекрытия до бруса всего 1.8 м. Пришлось вписать в эти параметры каретку с самосвальным корытом.
- Я строю не первый дом и, поднимать груз, через блок, вдвоём, то ещё удовольствие.
- С электрическим подъёмником работаешь один. Ни от кого не зависишь. Подъёмник пригодится для строительства бани, гаража, где он потом и останется.
ТОП-2: Kinova JACO Robot Manipulator (Research Edition)

Описание
Эта уникальная механическая рука манипулятор для профессионалов создан канадскими разработчиками. У руки манипулятора очень крепкий хват из шести соединений с неограниченным вращением вокруг оси.

Управляется рука манипулятор с помощью специального программного обеспечения через ПК, для чего оснащен входом USB. Программный интерфейс дает пользователю полный контроль, позволяет проводить диагностику.
Видео: JACO Research Edition by Kinova
Купить
| Предложения |
| https://robotbaza.ru/product/kinova-jaco-robot-manipulator-research-edition |
| https://www.colinz.ru/kinova-jaco-robot-manipulator-research-edition/ |
| https://www.ekaday.ru/shop/kinova-jaco-robot-manipulator/ |
| http://petropavlovsk-kamchatsky.modellino.ru/catalog/6334/662163/ |
| http://skidki73.ru/kinova-jaco-robot-manipulator-research-edition/ |
Назначение роботов

Создана рука манипулятор для того, чтобы заменить человека, т.е. выполнять за него монотонную или опасную работу.
Под промышленным понимают роботов, управляемых автоматическим спосмобом либо комбинированным. Их можно перепрограммировать на любые действия, которые предусматривает программа, выполнятся которые будут в автоматическом режиме.
Человек при этом не задействуется в монотонных работах, не требующих высокой квалификации, опасных для его здоровья и связанных с тяжелым физическим трудом.
Чтобы разобраться в вопросе детальнее, ниже будет рассмотрен ТОП-4 наиболее популярных роботов.
Отделка и сборка
1. Снимите поворотную опору, мачту В/С и боковины I с платформы лебедки J. Осмотрите все детали и, если требуется, дополнительно их отшлифуйте. Наденьте колеса и бадью на 6-миллиметровый стержень и подложите под его концы толстые обрезки. Чтобы нанести отделочное покрытие на деревянные оси, не затрагивая их концы, которые будут вклеиваться в отверстия, возьмите обрезок толстого бруска и, просверлив в нем восемь 10-миллиметровых отверстий, вставьте в них оси. Затем сделайте шесть 6-миллиметровых отверстий с интервалом не менее 50 мм в другом обрезке. Вставьте в четыре из них короткие шканты и насадите на их концы ручки-кнопки. Оберните малярным скотчем один конец каждого стержня с катушкой, а вторые концы вставьте в оставшиеся отверстия обрезка. Нанесите бесцветное покрытие на все детали игрушки. (Мы использовали полуматовый лак в аэрозольном баллоне, который наносили четыре раза с промежуточной шлифовкой наждачной бумагой № 320. Колеса после просушки каждого слоя обрабатывали мягкой щеткой из латунной проволоки.)
2. Наденьте на каждую ось колесо и шайбу. Вклейте оси в отверстия шассиА, вставляя между колесом и шайбой тонкую пластиковую прокладку, чтобы колеса могли свободно вращаться. 3. Шурупами прикрепите к платформе лебедки J одну из боковин I (рис.5). Наденьте на каждый стержень с катушкой шайбу, пружину и еще одну шайбу, вставьте их в отверстия боковины лебедки. Добавьте еще две шайбы с пружиной на каждый стержень и установите вторую боковину лебедки, чтобы стержни с катушками оказались между двумя боковинами. Наденьте еще по одной шайбе на выступающие снаружи концы стержней и насадите ручки-кнопки, смазав их отверстия клеем.
4. Прикрепите к платформе лебедки мачту В/С. Подготовьте два отрезка резьбовой шпильки М6 длиной 92 мм (на 10 мм больше ширины основания) и проденьте их сквозь отверстия боковин I и мачты (рис. 5). Нанесите на концы шпилек немного специальной пасты-фиксатора и наверните колпачковые гайки. Прикрепите поворотную опору шурупами к платформе J лебедки, а затем к шасси А.
5. Теперь возьмите еще два отрезка резьбовой шпильки длиной 67 и 29 мм. Вставьте стрелу D/E/F/H между боковыми деталями мачты В. Проденьте длинный отрезок шпильки в осевые отверстия (рис. 1). Нанесите пасту-фиксатор и наверните колпачковые гайки. Короткий отрезок вставьте в отверстия на переднем конце стрелы и также закрепите его с помощью колпачковых гаек, нанеся пасту-фиксатор.
6. Отрежьте шнур длиной 61 см и завяжите на одном его конце узел. Проденьте его сверху через отверстие в задней проставке стрелы Е, затем через отверстие в задней катушке и завяжите второй узел. Лишнюю часть шнура намотайте на катушку, вращая ручки-кнопки.
7. Отрежьте шнур длиной 183 см, проденьте его в отверстие передней катушки и завяжите узел. Затем проведите шнур в просвет между передней и задней проставками стрелы D, Е, через верхнюю проставку мачты С и между передней проставкой и передней резьбовой шпилькой. Привяжите к концу шнура грузовой крюк и намотайте свободный излишек шнура на катушку. Наконец, повесьте на крюк небольшую бадью. Не забудьте надеть рукавицы и защитную каску, перед тем как включить двигатель и дать волю воображению!
Игрушка «Подъемный кран», 3.9 out of 5 based on 7 ratings
Сборка в общих чертах

Теперь приступаем непосредственно к созданию руки-манипулятора. Начинаем с основания. Необходимо обеспечить возможность поворота устройства во все стороны. Хорошим решением будет его размещение на дисковой платформе, которая приводится во вращение с помощью одного мотора. Чтобы она могла вращаться в обе стороны, существует два варианта:
- Установка двух двигателей. Каждый из них будет отвечать за поворот в конкретную сторону. Когда один работает, второй пребывает в состоянии покоя.
- Установка одного двигателя со схемой, которая сможет заставить его крутится в обе стороны.
Какой из предложенных вариантов выбрать, зависит исключительно от вас. Далее делается основная конструкция. Для комфорта работы необходимо два «сустава». Прикреплённый к платформе должен уметь наклоняться в разные стороны, что решается с помощью двигателей, размещённых в его основании. Ещё один или пару следует разместить в месте локтевого изгиба, чтобы часть захвата можно было перемещать по горизонтальной и вертикальной линии системы координат. Далее, при желании получить максимальные возможности, можно установить ещё двигатель в месте запястья. Далее наиболее необходимое, без чего не представляется рука-манипулятор. Своими руками предстоит сделать само устройство захвата. Тут существует множество вариантов реализации. Можно дать наводку по двум самым популярным:
- Используется только два пальца, которые одновременно сжимают и разжимают объект захвата. Является самой простой реализацией, которая, правда, обычно не может похвастаться значительной грузоподъёмностью.
- Создаётся прототип человеческой руки. Тут для всех пальцев может использоваться один двигатель, с помощью которого будет осуществляться сгиб/разгиб. Но можно сделать и конструкцию сложней. Так, можно к каждому пальцу подсоединить по двигателю и управлять ими отдельно.
Далее остаётся сделать пульт, с помощью которого будет оказываться влияние на отдельные двигатели и темпы их работы. И можно приступать к экспериментам, используя робот-манипулятор, своими руками сделанный.
Скетч с использованием ультразвукового датчика расстояния
Это, наверное, одна из самых эффектных частей проекта. На манипулятор устанавливается датчик расстояния, который реагирует на препятствия вокруг.
Основные пояснения к коду представлены ниже
#define trigPin 7
#define echoPin 6
#define led 13
#include
Мы добавили в наш код серводвигатели, светодиод и датчик расстояния. Здесь изменять ничего не надо.
Следующий кусок кода:
Servo myservo1;
Servo myservo2;
Servo myservo3;
Servo myservo4;
Servo myservo5;
Мы присвоили всем 5-ти сигналам (для 6 приводов) названия (могут быть любыми)
Следующее:
void setup() {
Serial.begin (9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(led, OUTPUT);
myservo1.attach(3);
myservo2.attach(5);
myservo3.attach(9);
myservo4.attach(10);
myservo5.attach(11);
}
Мы сообщаем плате Arduino к каким пинам подключены светодиоды, серводвигатели и датчик расстояния. Изменять здесь ничего не стоит.
Идем дальше:
void position1(){
digitalWrite(led, HIGH);
myservo2.writeMicroseconds(1300);
myservo3.writeMicroseconds(1300);
myservo4.writeMicroseconds(800);
myservo5.writeMicroseconds(1000);
}
Здесь кое-что можно менять. Я задал позицию и назвал ее position1. Она будет использована в дальнейшей программе. Если вы хотите обеспечить другое движение, измените значения в скобках в диапазоне от 0 до 3000.
После этого:
void position2(){
digitalWrite(led,LOW);
myservo2.writeMicroseconds(1200);
myservo3.writeMicroseconds(1300);
myservo4.writeMicroseconds(1400);
myservo5.writeMicroseconds(2200);
}
Аналогично предыдущему куску, только в данном случае это position2. По такому же принципу вы можете добавлять новые положения для перемещения.
Дальше будет следующая запись:
void loop() {
long duration, distance;
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = (duration/2) / 29.1;
Теперь начинает отрабатывать основной код программы. Не стоит его изменять. Основная задача приведенных выше строк — настройка датчика расстояния.
После этого:
if (distance <= 30) {
position1();
}
else {
position2();
}
if (distance < 10) {
myservo5.writeMicroseconds(2200); //открыть схват
}
else {
myservo5.writeMicroseconds(1000); //закрыть схват
}
Теперь вы можете добавлять новые перемещения в зависимости от расстояния, измеренного ультразвуковым датчиком.
if(distance <=30){ // данная строка обеспечивает переход в position1, если расстояние меньше 30 см.
position1(); //по сути арм отработает все, что вы зададите между скобками { }
}
else{ // если расстояние больше 30 см, переход в position2
position()2 // аналогично предыдущей строке
}
Можно в коде поменять расстояние ну и творить все, что вы пожелаете.
Последние строки кода
if (distance > 30 || distance <= 0){
Serial.println(«Out of range»); //вывод в серийном монитеоре сообщения, что мы вышли за заданный диапазон
}
else {
Serial.print(distance);
Serial.println(» cm»); //расстояние в сантиметрах
}
delay(500); //задержка в 0.5 секунды
}
Конечно, можно перевести тут все в миллиметры, метры, изменить отображающееся сообщение и т.п. Можно немного поиграться с задержкой.
Вот, собственно и все. Наслаждайтесь, модернизируйте свои собственные манипуляторы, делитесь идеями и резутатами!
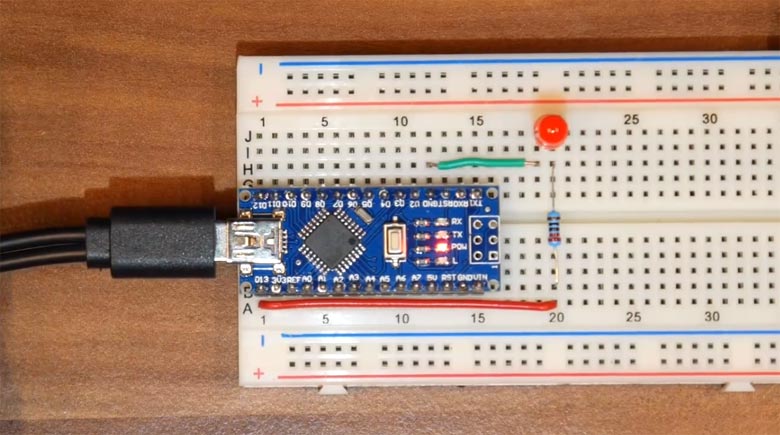
Шаг 10. Схема подключения
Как только Вы соберёте манипулятор, и подготовите разъем Nunchuk, Вы будете готовы что бы собрать электросхему. Мы использовали щит платы управления, который был в комплекте вместе с комплектом манипулятора. Это упрощает подключение компонентов, поскольку в нем уже имеются специальные разъемы для сервомоторов, источника питания и т. д.
Подключите компоненты следующим образом:
Контроллер:
- Контроллер контакт 6 (SCL) => Arduino Mega Контакт 21 (SCL) (на плате)
- Контроллер контакт 1 (SDA) => Arduino Mega Контакт 20 (SDA) (на плате)
- Контроллер контакт 3 (Vcc) => Ardino Mega Контакт 3V3 (на плате)
- Контроллер контакт 4 (Gnd) => Arduino Mega Контакт Gnd (на плате)
Если вы используете Arduino Uno, контакты Nunchuk SCL и SDA должны быть подключены к контактам Arduino следующим образом:
- Контроллер контакт 6 (SCL) => Arduino Uno контакт A5
- Контроллер контакт 1 (SDA) => Arduino Uno контакт A4
- Контроллер контакт 3 (Vcc) => Ardino Uno контакт 3V3
- Контроллер контакт 4 (Gnd) => Arduino Uno контакт Gnd
Сервопривод:
- Контакт Платы управления 11 => Сервопривод № 1
- Контакт Платы управления 12 => Сервопривод №2
- Контакт Платы управления 13 => Сервопривод № 3
- Контакт Платы управления 8 => Сервопривод № 4
- Контакт Платы управления 9 => Сервопривод №5
- Контакт Платы управления 10 => Сервопривод №6
Если вы не используете плату управления, Вы должны использовать следующую конфигурацию контактов:
- Arduino Контакт 11 => Серво #1 (Sgn)
- Arduino Контакт 12 => Серво #2 (Sgn)
- Arduino Контакт 13 => Серво #3 (Sgn)
- Arduino Контакт 8 => Серво #4 (Sgn)
- Arduino Контакт 9 => Серво #5 (Sgn)
- Arduino Контакт 10 => Серво #6 (Sgn)
- Arduino Контакт Gnd => Серво Gnd
- 6В Контакт питания => Серво Vcc
Вам также необходимо подключить внешний источник питания 12 В. Мы предлогаем использовать один блок с выходом более 2A. Сервоприводы потребляют много энергии, и если блок питания недостаточно мощный, сервоприводы будут вибрировать и перегреваться. Они также потеряют свою мощность.
Не подключайте источник питания до тех пор, пока Вы не загрузите код Arduino (см. Дальнейшие шаги). На плате есть кнопка питания. Держите её в выключенном положении.
Подключите USB-кабель к Arduino и перейдите к следующему шагу.
Пробы и ошибки
С такими входными параметрами я нарисовал первую версию. К сожалению, у меня не сохранилось фотографий той версии манипулятора (который был выполнен в желтом цвете). Ошибки в ней были просто эпичнейшие. Во-первых, ее было почти невозможно собрать. Как правило, механика которую я рисовал до манипулятора, была достаточно простая, и мне не приходилось задумываться о процессе сборки. Но все-таки я его собрал и попробовал запустить, И рука почти не двигалась! Все детли крутились вокруг винтов и, сли я затягивал их так, чтобы было меньше люфтов, она не могла двигаться. Если ослаблял так, чтобы она могла двигаться, появлялись невероятные люфты. В итоге концепт не прожил и трех дней. И приступил к работе над второй версией манипулятора.
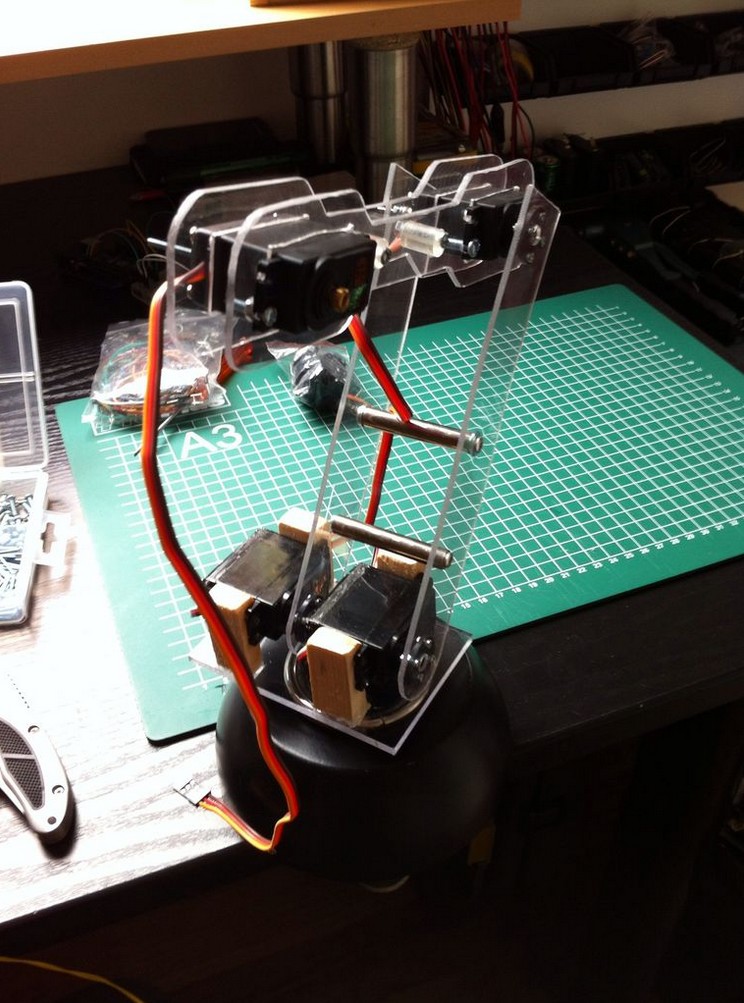
Красный был уже вполне пригоден к работе. Он нормально собирался и со смазкой мог двигаться. На нем я смог протестировать софт, но все-таки отсутствие подшипников и большие потери на разных тягах делали его очень слабым.
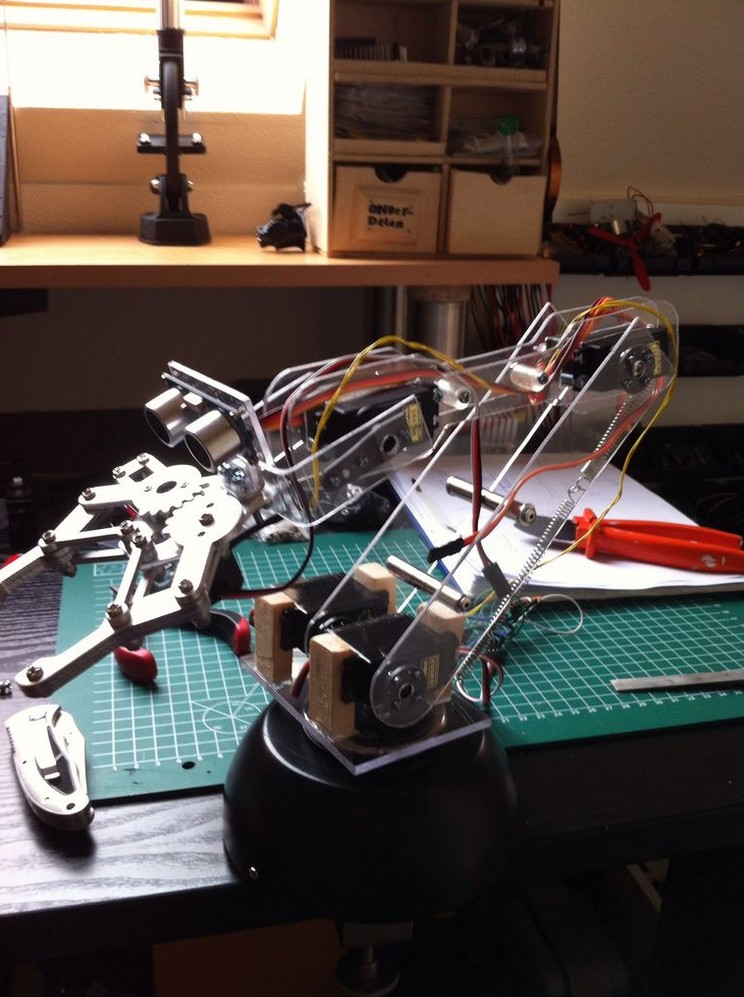
Затем я забросил работу над проектом на какое-то время, но вскоре принял решении довести его до ума. Я решил использовать более мощные и популярные сервоприводы, увеличить размер и добавить подшипники. Причем я решил, что не буду пытаться сделать сразу все идеально. Я набросал чертежи на скорую руки, не вычерчивая красивых сопряжений и заказал резку из прозрачного оргстекла. На получившемся манипуляторе я смог отладить процесс сборки, выявил места, нуждающиеся в дополнительном укреплении, и научился использовать подшипники.

После того, как я вдоволь наигрался с прозрачным манипулятором, я засел за чертежи финальной белой версии. Итак, сейчас вся механика полностью отлажена, устраивает меня и готов заявить, что больше ничего не хочу менять в этой конструкции:

Меня удручает то, что я не смог привнести ничего принципиально нового в проект uArm. К тому времени, как я начал рисовать финальную версию, они уже выкатили 3D-модели на GrabCad. В итоге я только немного упростил клешню, подготовил файлы в удобном формате и применил очень простые и стандартные комплектующие.
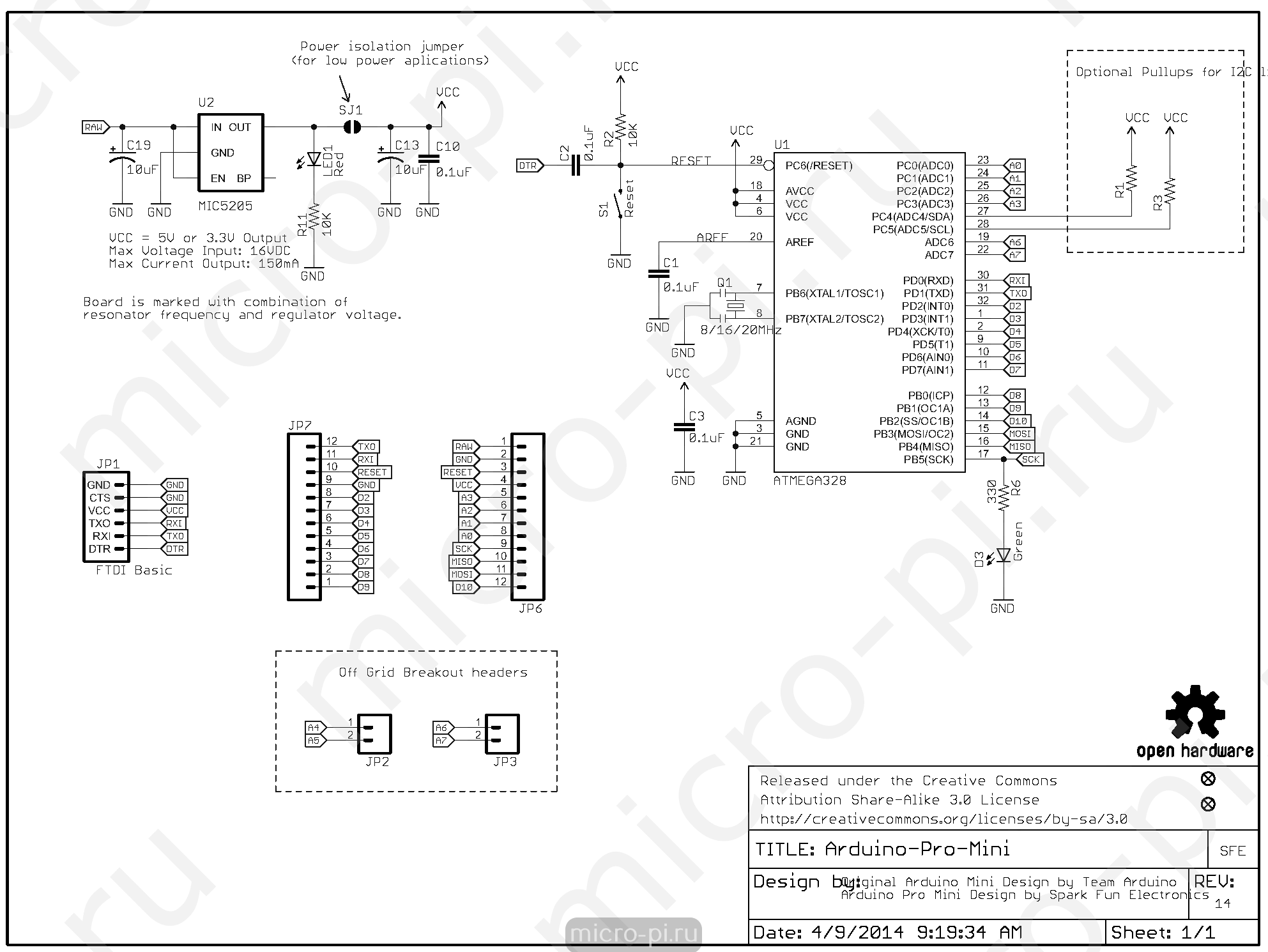
Электросхема
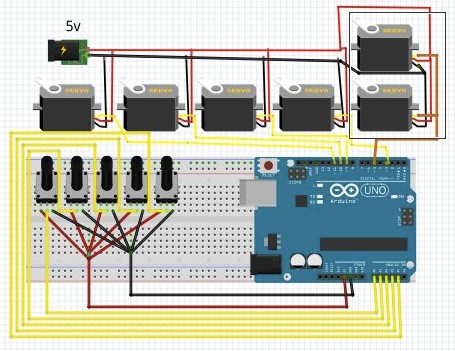



Можно использовать вместо резистора R1 потенциометр на 100 кОм для регулировки яркости вручную. В качестве сопротивлени R2 использовались резисторы на 118 Ом.
Перечень основных узлов, которые использовались:
- R1 — резистор на 100 кОм
- R2 — резистор на 118 Ом
- Транзистор bc547
- Фоторезистор
- 7 светодиодов
- Переключатель
- Подключение к плате Arduino
В качестве микроконтроллера использовалась плата Arduino. В качестве питания использовался блок питания от персонального компьютера. Подключив мультиметр к красному и черному кабелям, вы увидите 5 вольт (которые используются для серводвигателей и ультразвукового датчика расстояния). Желтый и черный дадут вам 12 вольт (для Arduino). Делаем 5 коннекторов для сервомоторов, параллельно подключаем позитивные к 5 В, а негативные — к земле. Аналогично с датчиком расстояния.
После этого подключите оставшиеся коннекторы (по одному с каждой сервы и два с дальномера) к распаянной нами плате и Arduino. При этом не забудьте в программе в дальнейшем корректно указать пины, которые вы использовали.
Кроме того, на плате питания был установлен светодиод-индикатор питания. Реализуется это несложно. Дополнительно использовался резистор на 100 Ом между 5 В и землей.
10 миллиметровый светодиод на роботе тоже подключен к Arduino. Резистор на 100 Ом идет от 13 пина к к позитивной ноге светодиода. Негативный — к земле. В программе его можно отключить.
Для 6 серводвигателей использовано 6 коннекторов, так как 2 серводвигателя снизу используют одинаковый сигнал управления. Соответствующие проводники соединяются и подключаются к одному пину.
Повторюсь, что в качестве питания используется блок питания от персонального компьютера. Либо, конечно, вы можете приобрести отдельный источник питания. Но с учетом, того, что у нас 6 приводов, каждый из которых может потреблять около 2 А, подобный мощный блок питания обойдется недешево.
Обратите внимание, что коннекторы от серв подключаются к ШИМ-выходам Arduino. Возле каждого такого пина на плате есть условное обозначение ~
Ультразвуковой датчик расттояния можно подключить к пинам 6, 7. Светодиод — к 13 пину и земле. Это все пины, которые нам понадобятся.
Теперь мы можем перейти к программированию Arduino.
Перед тем как подключить плату через usb к компьютеру, убедитесь, что вы отключили питание. Когда будете тестировать программу, также отключайте питание вашей робо-руки. Если питание не выключить, Arduino получит 5 вольт от usb и 12 вольт от блока питания. Соответственно, мощность от usb перекинется к источнику питания и он немного «просядет».
На схеме подключения видно, что были добавлены потенциометры для управления сервами. Потенциометры не являются обязательным звеном, но приведенный код не будет работать без них. Потенциометры можно подключить к пинам 0,1,2,3 и 4.
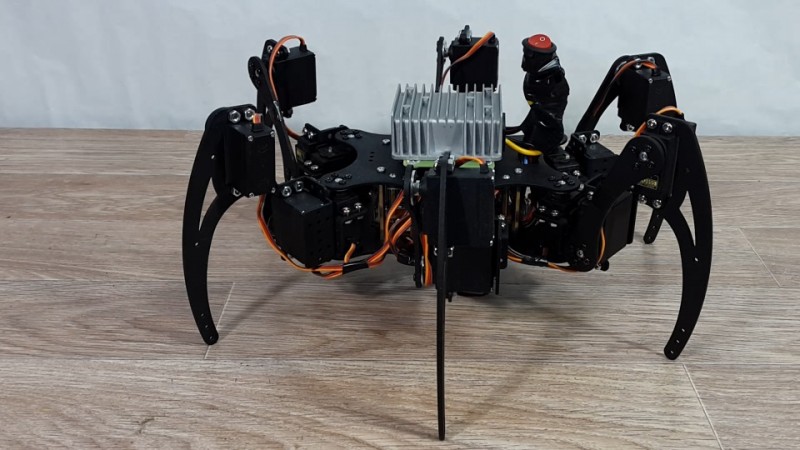
ТОП-1: Advanced Robotic Manipulator (ARM 2.0) — Closed Loop

Описание
Рука манипулятор имеет шесть опор и открытый интерфейс управления, с досягаемостью, достигающей в диаметре 2,2 метра, что позволяет обеспечить реализацию в любые проекты. Каждое соединение имеет свое положение благодаря присвоенному RC PWM-сигналу.
Устройство ARM 3.0 отличается высокой надежностью благодаря обработанным сегментам углеродным и из алюминиевого сплава.

Приводы этот рычаг использует линейные и вращающиеся. Точное перемещение в суставах возможно благодаря шариковым подшипникам в герметичном кожухе.
При полной мощности величина полного тока равна 7 амперам. Основание способно вращаться со скоростью до 60 град/сек. Скорость вращения запястья — 240 град за 2,3 секунды.
Рекомендуем:
- Робот охранник: что собой представляет, возможности, характеристики, цена
- Робопылесосы ТОП 10: их параметры, цены и где купить:
- Роботы – манипуляторы — виды, назначение, цена и где купить: ТОП 6
Время между полным закрытием захвата руки манипулятора и полным открытием – менее секунды. Устройство защищено от токовых перегрузок и обратного питания. Имеется у него светодиодный индикатор питания, кнопка включения которого расположена на корпусе.
В работающем состоянии он загорается зеленым.
Контроль положения
Все соединения с замкнутым контуром функционируют в режиме управления положением. PWM готовы, если с RC-радио или микроконтроллера дана команда. Обратную связь используют все соединения. Версия ARM лучшим образом подходит для приложений, в которых ею управляют с компьютера, отправляющего команду каждому из соединений для перехода в заданную позицию, которую потом удерживает ARM.

Особенности
- Нижние 4 сустава даже при отключении питания не меняют заданного положения;
- Прочный корпус их алюминия;
- Для ввода сигнала и питания разъем DB-25;
- Сегменты углеволокна;
- Индикатор питания на светодиодах;
- Обратное защитное соединение;
- Радиус охвата – 2,2 метра;
- Масса – 9,2 кг;
- Грузоподъемность 4,5 кг при полном расширении;
- Ток входа — 12В.
Видео: Invenscience ARM 2.0
Цена
Выгодно руку манипулятор купить можно в Интернет:
| Предложения | Цены |
| https://robotbaza.ru/product/advanced-robotic-manipulator-arm-20-closed-loop | по запросу |
| http://buy-5.smartchoices24.com/dealsgs/gs1__47/29764 | то же |
| https://ru.aliexpress.com/popular/robot-manipulator-arm.html | то же |
| http://ir74.ru/catalog/robototekhnika-konstruktory-roboty-3d-printery-gadzhety/Roboty/Professionalnye_roboty/Roboty_Manipulyatory/Advanced_Robotic_Manipulator_ARM_20_-_Open_Loop/ | то же |
| http://cyber-r.ru/cat/585/101700/ | то же |
Основные характеристики
При изготовлении самодельной кран-балки лучше ориентироваться на технические параметры моделей заводского изготовления. Эти характеристики рассчитывались квалифицированными специалистами, поэтому оптимально подойдут для многоцелевого применения.
Характеристики различных модификаций могут отличаться, но в целом, это выглядит так:
- Рабочая зона. Длина пролёта варьируется в пределах 3-28.5 метров. Ориентироваться на этот показатель не стоит: не каждый гараж обладает такой площадью, поэтому длина кранового пути подбирается исходя из фактического размера помещения.
- Высота подъема. Промышленные подъемники поднимают груз на высоту 6-18 метров. Для частного применения, можно остановиться на минимальном варианте. Например, если речь идет о простом тельфере для трактора или легкового авто, достаточно высоты подъема в 1.5 метра.
- Напряжение. Электрооборудование работает от трехфазной сети в 380В. Если предполагается установка грузоподъемного устройства с ручным приводом, этот параметр неактуален.
- Диапазон рабочих температур. Заводские модели корректно работают при температуре -20/+40 градусов. Этот параметр нужно учитывать при выборе комплектующих деталей.
Применение
Особенности применения регламентируются тем, что в современном производстве владельцы фабрик и заводов стараются предотвратить получение травм своим персоналом. Как результат роботизированная рука-манипулятор широко применяться в условиях повышенной опасности. Там, где раньше человеку нужно было использовать специальный костюм или скафандр — легко справляется робот.
Изначально манипуляторы применялись в машиностроении. Их использование позволило сделать поток производства непрерывным и сократить ошибки персонала к минимуму. Новатором в данной отрасли считается компания BMW, именно она имеет самые передовые кибертехнологии на данный момент.
К началу XXI века роботы-манипуляторы начинают массовую миграцию во все отрасли народного хозяйства. Их используют для сбора урожая, а также организации процесса птицеводства и животноводства. Мечты гениев робототехники обретают плоть, всё больше внедряясь в производственный процесс. Уровень автоматизации неуклонно растёт, давая возможность делать работу быстрее и качественнее.
Для выполнения своих задач роботу не нужно хорошее освещение или правильная вентиляция воздуха. Достаточно постоянного источника питания. Чтобы манипулятор-рука исправно выполнял свои функции необходимо проводить периодическое техническое обслуживание.
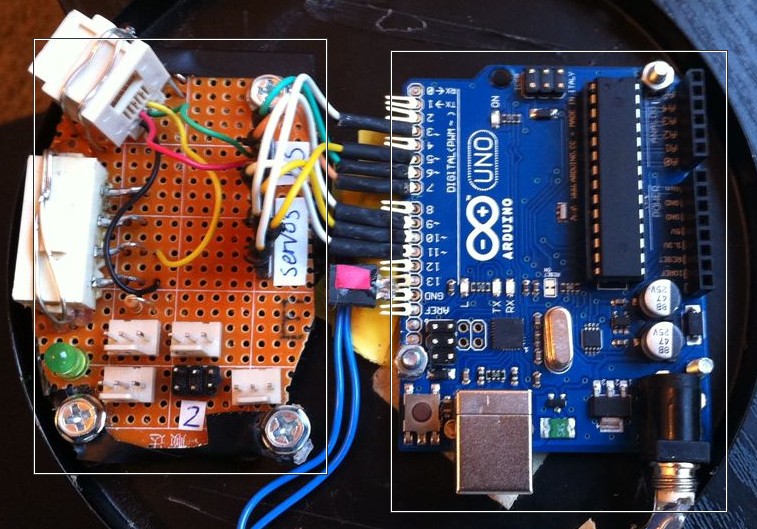
Электроника
Тут мое повествование тесно сплетается с предыдущими проектами. С некоторых пор я начал и для этих целей даже подготовил свою Arduino-совместимую плату . С другой стороны как-то раз мне подвернулась возможность дешево изготовить платы (о чем я тоже ). В итоге все это закончилось тем, что я использовал для управления манипулятором свою собственную Arduino-совместимую плату и специализированный шилд.
Этот шилд на самом деле очень простой. На нем четыре переменных резистора, две кнопки, пять разъемов для сервопривода и разъем питания. Это очень удобно с точки зрения отладки. Можно загрузить тестовый скетч и записать какой-нибудь макрос для управления или что-нибудь вроде того. Ссылку для скачивания файла платы я тоже дам в конце статьи, но она подготовлена для изготовления с металлизацией отверстий, так что мало пригодна для домашнего производства.