Ошибка компиляции для плат arduino
Содержание:
- Описание пинов Ардуино
- Интерфейсы связи
- Зачем нужны шилды arduino?
- Отличие от других плат
- Аналоговые, цифровые и шим пины Ардуино
- Библиотеки в Arduino IDE
- Синтаксис функции
- Ошибки библиотек
- Ошибки библиотек
- Структура памяти Ардуино, где располагается скетч и данные
- Основные ошибки
- Ошибка: «avrdude: stk500_recv(): programmer is not responding»
- Ошибка: «a function-definition is not allowed here before ‘{‘ token»
- Ошибка: «No such file or directory / exit status 1»
- Ошибка: «expected initializer before ‘}’ token / expected ‘;’ before ‘}’ token»
- Ошибка: «… was not declared in this scope»
- Ошибка компиляции для Arduino Nano, Uno, Mega
- Программирование Arduino Shield
- Define или const
Описание пинов Ардуино
Пины Ардуино используются для подключения внешних устройств и могут работать как в режиме входа (INPUT), так и в режиме выхода (OUTPUT). К каждому входу может быть подключен встроенный резистор 20-50 кОм с помощью выполнения команды pinMode () в режиме INPUT_PULLUP. Допустимый ток на каждом из выходов – 20 мА, не более 40 мА в пике.
Для удобства работы некоторые пины совмещают в себе несколько функций:
- Пины 0 и 1 – контакты UART (RХ и TX соответственно) .
- Пины c 10 по 13 – контакты SPI (SS, MOSI, MISO и SCK соответственно)
- Пины A4 и A5 – контакты I2C (SDA и SCL соответственно).
Цифровые пины платы Uno
Пины с номерами от 0 до 13 являются цифровыми. Это означает, что вы можете считывать и подавать на них только два вида сигналов: HIGH и LOW. С помощью ШИМ также можно использовать цифровые порты для управления мощностью подключенных устройств.
| Пин ардуино | Адресация в скетче | Специальное назначение | ШИМ |
| Цифровой пин 0 | RX | ||
| Цифровой пин 1 | 1 | TX | |
| Цифровой пин 2 | 2 | Вход для прерываний | |
| Цифровой пин 3 | 3 | Вход для прерываний | ШИМ |
| Цифровой пин 4 | 4 | ||
| Цифровой пин 5 | 5 | ШИМ | |
| Цифровой пин 6 | 6 | ШИМ | |
| Цифровой пин 7 | 7 | ||
| Цифровой пин 8 | 8 | ||
| Цифровой пин 9 | 9 | ШИМ | |
| Цифровой пин 10 | 10 | SPI (SS) | ШИМ |
| Цифровой пин 11 | 11 | SPI (MOSI) | ШИМ |
| Цифровой пин 12 | 12 | SPI (MISO) | |
| Цифровой пин 13 | 13 | SPI (SCK)
К выходу также подсоединен встроенный светодиод (есть в большинстве плат Arduino) |
Аналоговые пины Arduino Uno
Аналоговые пины Arduino Uno предназначены для подключения аналоговых устройств и являются входами для встроенного аналого-цифрового преобразователя (АЦП), который в ардуино уно десятиразрядный.
| Пин | Адресация в скетче | Специальное назначение |
| Аналоговый пин A0 | A0 или 14 | |
| Аналоговый пин A1 | A1 или 15 | |
| Аналоговый пин A2 | A2 или 16 | |
| Аналоговый пин A3 | A3 или 17 | |
| Аналоговый пин A4 | A4 или 18 | I2C (SCA) |
| Аналоговый пин A5 | A5 или 19 | I2C (SCL) |
Дополнительные пины на плате
- AREF – выдает опорное напряжения для встроенного АЦП. Может управляться функцией analogReference().
- RESET – подача низкого сигнала на этом входе приведет к перезагрузке устройства.
Интерфейсы связи
Arduino Nano поддерживает интерфейс I2C для связи с различными устройствами и периферией. Один из часто встречающихся способов применения – это связь с дисплеем через шину I2C. Благодаря особой технологии вы можете выводить наборы символов и данных на дисплей, используя всего лишь 2 пина, в Нано это пины D4 SDA) и D5 (SCL).
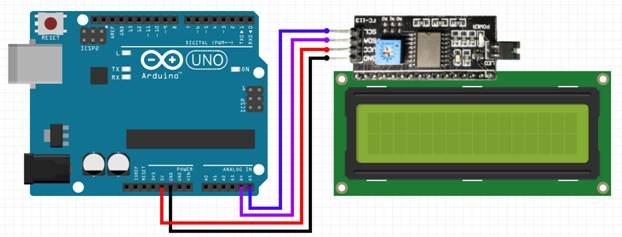
К Ардуино Нано подключение аналогично — используйте отмеченные ранее пины. Для работы с дисплеем вам понадобится библиотека, которую можно скачать ниже:
Код программы ниже:
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
LiquidCrystal_I2C lcd(0x27,16,2); // установка адреса LCD на 0x27 для 16 символов и 2 строк
void setup()
{
lcd.init(); // инициализация дисплея
// Print a message to the LCD.
lcd.backlight();
lcd.print("Hello, world!");
}
void loop()
{
}
Пример скетча — управление задней подсветкой модуля I2C LCD1602:
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
#if defined(ARDUINO) && ARDUINO >= 100
#define printByte(args) write(args);
#else
#define printByte(args) print(args,BYTE);
#endif
LiquidCrystal_I2C lcd(0x27,16,2); // установка адреса LCD на 0x27 для 16 символов и 2 строк
void setup(){
lcd.init(); // инициализация дисплея
lcd.backlight();
lcd.home();
lcd.print("Hello world...");
lcd.setCursor(0, 1);
lcd.print("dfrobot.com");
}
int backlightState = LOW;
long previousMillis = 0;
long interval = 1000;
void loop(){
unsigned long currentMillis = millis();
if(currentMillis - previousMillis > interval) {
previousMillis = currentMillis;
if (backlightState == LOW)
backlightState = HIGH;
else
backlightState = LOW;
if(backlightState == HIGH) lcd.backlight();
else lcd.noBacklight();
}
}
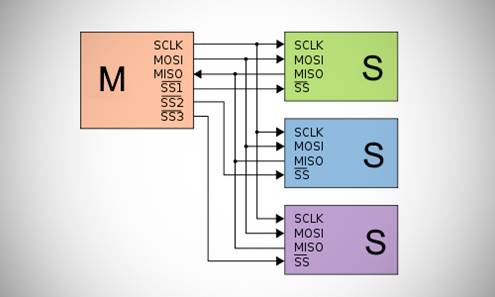
Работа с SPI требует два пина под передачу данных (master in и out):
- для выбора системы, с которой идёт «общение» (SS или CS – crystal/system select),
- сигнал тактирования SCLK.
На официальном сайте есть специальная библиотека для работы с ним. При написании программ не забудьте подключить её директивой:
#include SPI.h
Теперь можно организовывать систему связи.
Зачем нужны шилды arduino?
Все очень просто: 1) для того, чтобы мы экономили время, и 2) кто-то смог заработать на этом. Зачем тратить время, проектируя, размещая, припаивая и отлаживая то, что можно взять уже в собранном варианте, сразу начав использовать? Хорошо продуманные и собранные на качественном оборудовании платы расширения, как правило, более надежны и занимают меньше места в конечном устройстве. Это не значит, что нужно полностью отказываться от самостоятельной сборки и не нужно разбираться в принципе действия тех или иных элементов. Ведь настоящий инженер всегда старается понять, как работает то, что он использует
Но мы сможем делать более сложные устройства, если не будем каждый раз изобретать велосипед, а сосредоточим свое внимание на том, что до нас еще мало кто решал
Естественно, за возможности приходится платить. Практически всегда стоимость конечного шилда будет выше цены отдельных комплектующих, всегда можно сделать аналогичный вариант подешевле. Но тут уже решать вам, насколько критично для вас потраченные время или деньги. С учетом посильной помощи китайской промышленности, стоимость плат постоянно снижается, поэтому чаще всего выбор делается в пользу использования готовых устройств.
Наиболее популярным примерами шилдов являются платы расширения для работы с датчиками, двигателями, LCD-экранами, SD-картами, сетевые и GPS-шилды, шилды со встроенными реле для подключения к нагрузке.
Отличие от других плат
Сегодня на рынке можно встретить множество вариантов плат ардуино. Самыми популярными конкурентами Уно являются платы Nano и Mega. Первая пойдет для проектов, в которых важен размер. Вторая – для проектов, где у схема довольно сложна и требуется множество выходов.
Отличия Arduino Uno от Arduino Nano
Современные платы Arduino Uno и Arduino Nano версии R3 имеют, как правило, на борту общий микроконтроллер: ATmega328. Ключевым отличием является размер платы и тип контактных площадок. Габариты Arduino Uno: 6,8 см x 5,3 см. Габариты Arduino Nano: 4,2 см x 1,85 см. В Arduino UNO используются коннекторы типа «мама», в Nano – «гребень» из ножек, причем у некоторых моделей контактные площадки вообще не припаяны. Естественно, больший размер UNO по сравнению с Nano в некоторых случаях является преимуществом, а в некоторых – недостатком. С платой большого размера гораздо удобнее производить монтаж, но она неудобна в реальных проектах, т.к. сильно увеличивает габариты конечного устройства.
На платах Arduino Uno традиционно используется разъем TYPE-B (широко применяется также для подключения принтеров и МФУ). В некоторых случаях можно встретить вариант с разъемом Micro USB. В платах Arduino Nano стандартом является Mini или Micro USB.
Естественно, различия есть и в разъеме питания. В плате Uno есть встроенный разъем DC, в Nano ему просто не нашлось места.
Кроме аппаратных, существуют еще небольшие отличия в процессе загрузки скетча в плату. Перед загрузкой следует убедиться, что вы выбрали верную плату в меню «Инструменты-Плата».
Отличия от Arduino Mega
Плата Mega в полном соответствии со своим названием является на сегодняшний день самым большим по размеру и количеству пинов контроллеров Arduino. По сравнению с ней в Uno гораздо меньше пинов и памяти. Вот список основных отличий:
- Плата Mega использует иной микроконтроллер: ATMega 2560. Но тактовая частота его равна 16МГц, так же как и в Уно.
- В плате Mega большее количество цифровых пинов – 54 вместо 14 у платы Uno. И аналоговых – 16 / 6.
- У платы Mega больше контактов, поддерживающих аппаратные прерывания: 6 против 2. Больше Serial портов – 4 против 1.
- По объему памяти Uno тоже существенно уступает Megа. Flash -память 32/256, SRAM – 2/8, EEPROM – 4/1.
Исходя из всего этого можно сделать вывод, что для больших сложных проектов с программами большого размера и активным использованием различных коммуникационных портов лучше выбирать Mega. Но эти платы дороже Uno и занимают больше места, поэтому для небольших проектов, не использующих все дополнительные возможности Mega, вполне сойдет Uno – существенного прироста скорости при переходе на “старшего” брата вы не получите.
Аналоговые, цифровые и шим пины Ардуино
Все пины можно разделить на несколько видов, различие будет только в количестве данных выводов на различных платах. Например, на Arduino Mega 2560 цифровых и аналоговых портов, значительно больше, чем на Uno или Nano из-за большего размера платы и производительности микроконтроллера. В остальном характеристики и способы программирования пинов не отличаются друг от друга.
- Power Pins — порты питания, режим их работы нельзя запрограммировать или изменить. Они выдают стабилизированное напряжение 5V или 3,3V, Vin выдает напряжение от источника питания, а GND — это заземление (общий минус);
- PWM Pins — порты с ШИМ модуляцией, которые можно запрограммировать, как цифровой выход/вход. Данные порты обозначены на плате знаком тильда (˜);
- Analog In — порты, принимающие аналоговый сигнал от датчиков, работают на вход. Данные порты тоже можно запрограммировать, как цифровой вход/выход. Данные пины не поддерживают ШИМ модуляцию.
Режим пинов назначается в процедуре void setup с помощью pinMode(), например:
void setup() {
pinMode(10, OUTPUT); // объявляем пин 10 как выход
pinMode(A2, OUTPUT); // объявляем пин A2 как выход
pinMode(12, INPUT); // объявляем пин 12 как вход
pinMode(A1, INPUT); // объявляем пин A1 как вход
}
Пояснения к коду:
- к выходу 10 и A2 можно подключить светодиод, который будет включаться и выключаться при вызове команды в программе;
- пин 10 может использоваться для ШИМ сигнала, например, чтобы плавно включить светодиод, а пин A2 может выдавать только цифровой сигнал (0 или 1);
- к входу 12 и A1 можно подключить цифровой датчик и микроконтроллер будет проверять наличие сигнала на этих пинах (логический нуль или единицу);
- к входу A1 можно подключить аналоговый датчик тогда микроконтроллер будет получать не только сигнал но и узнавать характеристику сигнала.
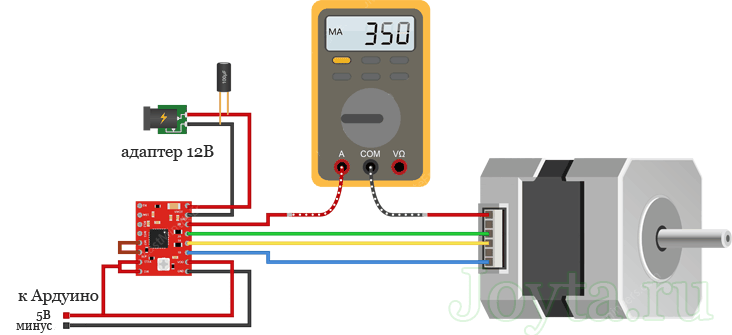
Мы не случайно разделили пины с ШИМ модуляцией (PWM Pins) и аналоговые. PWM пины создают аналоговый сигнал, к ним подключают сервопривод, шаговый двигатель и другие устройства, где требуется подавать сигнал с разными характеристиками. Аналоговые пины (Analog In) используются для подключения аналоговых датчиков, с них входящий сигнал преобразуется в цифровой с помощью встроенного АЦП.
Ардуино Uno пины: шим, аналоговые, цифровые
Arduino UNO распиновка платы на русском
| ШИМ (PWM) порты (Analog Out) |
3, 5, 6, 9, 10, 11 |
| Аналоговые порты (Analog In) |
A0, A1, A2, A3, A4, A5 на некоторых платах: A6, A7 |
| Цифровые порты (Digital In/Out) |
все порты со 2 по 13 пин можно использовать: A0 — A7 |
Из таблицы видно, какие пины на Arduino UNO поддерживают шим. Аналоговые пины (Analog In) используют, как цифровые если недостаточно портов общего назначения, например, вы хотите подключить к плате 15 светодиодов. Кроме того, на плате Arduino Uno и Nano порты A4 и A5 используются для I2C протокола (SDA и SCL пины) — они работают параллельно с пинами A4 и A5. Об этом мы расскажем чуть позже.
Ардуино Nano пины: шим, аналоговые, цифровые
Arduino Nano распиновка платы на русском
| ШИМ (PWM) порты (Analog Out) |
3, 5, 6, 9, 10, 11 |
| Аналоговые порты (Analog In) |
A0, A1, A2, A3, A4, A5 на некоторых платах: A6, A7 |
| Цифровые порты (Digital In/Out) |
все порты со 2 по 13 пин можно использовать: A0 — A7 |
Если вы заметили, то пины на Arduino Nano и Uno имеют одинаковое количество и назначение. Платы отличаются лишь своими габаритами. Nano — более компактная и удобная плата, для экономии места на нее не ставят разъем питания, для этого используются пины Vin и GND на которое подается питание от источника.
Ардуино Mega пины: шим, аналоговые, цифровые
Схема распиновки платы Arduino Mega 2560 r3
| ШИМ (PWM) порты (Analog Out) |
все порты со 2 по 13 пин дополнительно: 44, 45, 46 пин |
| Аналоговые порты (Analog In) |
с A0 до A15 |
| Цифровые порты (Digital In/Out) |
все порты со 2 по 13, со 22 по 52 пин можно использовать: A0 — A15 |
Пины коммуникации нежелательно использовать, как обычные цифровые порты. Особенно при таком количестве портов общего назначения, как на Mega 2560. Более подробную информацию о рассмотренных платах, а также о других микроконтроллерах семейства Arduino (Pro Mini, Leonardo, Due и пр.): характеристики, описание пинов, габариты и т.д. можно узнать в разделе Микроконтроллеры на нашем сайте.
Библиотеки в Arduino IDE
Библиотека в Ардуино – это программный код во внешних файлах, которые можно установить и подключить к вашему скетчу. В библиотеке хранятся различные методы и структуры данных, которые нужны для упрощения работы с датчиками, индикаторами, модулями и другими компонентами. Использование библиотек существенно упрощает работу над проектами, потому что можно сосредоточиться на основной логике программы, не тратя время на множество мелочей. Сегодня огромное количество библиотек выложено в интернете, где их можно легко скачать, причем совершенно бесплатно. Наиболее популярные библиотеки можно найти на нашем сайте.
С точки зрения файловой системы библиотека представляет собой каталог, содержащий определенные папки. Во время компиляции и сборки проекта Arduino IDE автоматически включает в код те классы, структуры данных и методы из библиотек, которые включены и используются в скетче. Таким образом, единственное, что нам нужно сделать – это выставить в свой код соответствующие инструкции, предварительно убедившись, что нужная библиотека установлена.
Как узнать список подключенных библиотек к Arduino IDE
Каждая установленная библиотека содержит один или несколько примеров для работы. Они используются для того, чтобы отобразить возможности подключенного к Ардуино устройства. Поэтому самым быстрым способом получить список всех установленных библиотек ардуино – воспользоваться списком примеров в Arduino IDE. Для этого в главном меню выберите Файл,а затем откройте подменю Примеры.
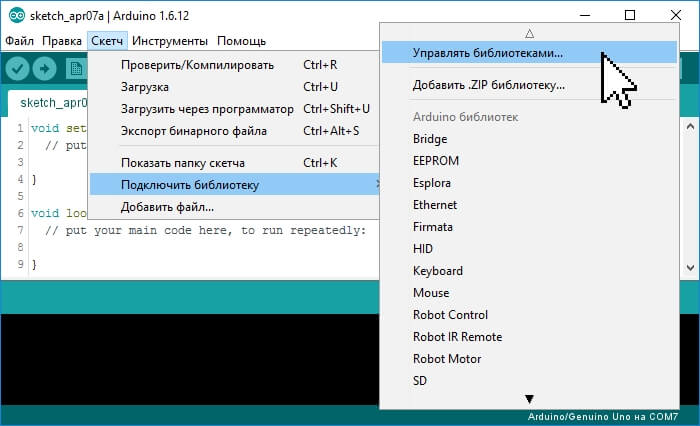
Другим способом является использование меню Скетч и подменю – Подключить библиотеку. Там вы тоже сможете увидеть список библиотек:
Список библиотек ардуино
Подключение оператором #include заголовочного h файла
Чтобы начать пользоваться библиотекой, нужно в начале программы включить заголовочный h файл директивой include. Например, подключение библиотеки LiquidCrystal.h будет выглядеть так: #include <LiquidCrystal.h>
Вы можете посмотреть полный пример, воспользовавшись самой библиотекой.
Синтаксис функции
Команда Serial.begin () состоит из двух частей. Первая часть, Serial, является названием класса библиотеки для работы с монитором порта. Вторая часть, begin() обозначает название метода, которому мы должны передать один аргумент – скорость обмена данными. Функция не возвращает значений.
Синтаксис функции, два варианта:
Serial.begin(<скорость>)
Serial.begin(<скорость>, <config> )
Параметры:
- скорость – скорость взаимодействия (бит/сек или бод).
- config – настройки режима работы последовательного порта. По умолчанию используется наиболее распространенный вариант, SERIAL_8N1.
Скорость для последовательного порта в Serial.begin()
Стандартное значение скорости в аргументе функции begin() – 9600. Эта цифра означает, что плата ардуино будет посылать по последовательному порту данные со скоростью 9600 бит в секунду (нужно учитывать, что для каждых 8 бит еще высылаются служебный стоповый бит). Естественно, приемно-передающее устройства на другом конце провода тоже должно быть настроено на эту же скорость, иначе оно будет пропускать некоторые биты или излишне торопиться, что приведет к рассинхронизации – информация будет как бы рваться на кусочки. Поэтому без лишней надобности не меняйте параметр по умолчанию – 9600.
Кроме стандартного значения можно устанавливать и другие: 300, 1200, 2400, 4800, 9600, 14400, 19200, 28800, 38400, 57600, 115200. Чем выше цифра, тем выше скорость обмена, но нужно следить, чтобы эту скорость поддерживало и внешнее устройство. В некоторых ситуациях слишком высокая скорость обмена может привести к ошибкам, нужно учитывать и это. Так, например, значение 115200 устанавливаются обычно специальными высокоскоростными устройствами, например, полетными контроллерами. Значения ниже 9600 используются крайне редко.
Второй параметр для последовательного порта
Параметр config в функции begin обычно не указывается, т.к. крайне редко надо менять значения по умолчанию. Но на всякий случай приведем здесь возможные варианты параметров, которые можно найти в HardwareSerial.h:
- #define SERIAL_5N1 0x00
- #define SERIAL_6N1 0x02
- #define SERIAL_7N1 0x04
- #define SERIAL_8N1 0x06
- #define SERIAL_5N2 0x08
- #define SERIAL_6N2 0x0A
- #define SERIAL_7N2 0x0C
- #define SERIAL_8N2 0x0E
- #define SERIAL_5E1 0x20
- #define SERIAL_6E1 0x22
- #define SERIAL_7E1 0x24
- #define SERIAL_8E1 0x26
- #define SERIAL_5E2 0x28
- #define SERIAL_6E2 0x2A
- #define SERIAL_7E2 0x2C
- #define SERIAL_8E2 0x2E
- #define SERIAL_5O1 0x30
- #define SERIAL_6O1 0x32
- #define SERIAL_7O1 0x34
- #define SERIAL_8O1 0x36
- #define SERIAL_5O2 0x38
- #define SERIAL_6O2 0x3A
- #define SERIAL_7O2 0x3C
- #define SERIAL_8O2 0x3E
В этих константах обозначаются разные варианты структуры пакета данных. Например, SERIAL_8N2 означает, что по последовательному порту ардуино передаст пакет длиной 8 бит без бита контроля четности (указано N) и с одним стоповым битом, который будет добавлен после байта данных.
Ошибки библиотек
Если произошла ошибка при компиляции скетча Ардуино, но не выводилось ни одно из вышеописанных сообщений, то можете смело искать баг в библиотеках МК. Это наиболее неприятное занятие для большинства программистов, ведь приходится лазить в чужом коде, но без этого никак.
Ведь банально причина может быть в устаревшем синтаксисе скачанного плагина и, чтобы он заработал, необходимо переписать его практически с нуля. Это единственный выход из сложившейся ситуации. Но бывают и более банальные ситуации, когда вы подключили библиотеку, функции из которой затем ни разу не вызвали, или просто перепутали название.
Ошибки библиотек
Огромное количество ошибок при компиляции для Arduino может быть вызвано неправильно подключенными библиотеками или ошибками внутри самих библиотек. Рассмотрим только некоторые из них:
- Ошибка fatal error: … No such file or directory. Возникает, если вы подключаете библиотеку, которую не установили предварительно в папку libraries. Ардуино просто не может найти указанный файл декларации и дает об этом знать.
- Сообщение об ошибке в одном из подключенных файлов. Означает, что вы скачали плохо написанную библиотеку или пытаетесь подключить несовместимые библиотеки. Обратитесь на форум к разработчику библиотеки или еще раз проверьте корректность структуры вашего приложения.
- Ошибки типа redefinision of void setup’ – возникают, если в подключаемой библиотеке автор зачем то уже объявил функции, которые в используете в своем скетче. Нужно переименовать методы (у себя или в бибилиотеке)
Структура памяти Ардуино, где располагается скетч и данные
На микроконтроллере Ардуино имеется 3 вида памяти – флеш-память, которая используется для хранения скетчей, ОЗУ для хранения переменных и EEPROM для хранения постоянной информации. Из этих типов памяти флеш-память и EEPROM являются энергонезависимыми, то есть информация сохраняется при выключении питания. ОЗУ используется только для хранения данных, которые имеют отношение к исполняемой программе.
Микроконтроллер ATmega168, который используется на части плат Ардуино, имеет 16 Кб флеш-памяти, 1024 байта для ОЗУ и 512 байт EEPROM
Важно обратить внимание на малый объем ОЗУ. Большие программы могут полностью ее израсходовать, что приведет к сбою в программе. По этой причине нужно следить за тем, сколько строк занимает программа, и по возможности удалять лишнее
Уменьшить объем кода можно несколькими способами:
По этой причине нужно следить за тем, сколько строк занимает программа, и по возможности удалять лишнее. Уменьшить объем кода можно несколькими способами:
- Можно отправить часть информации на компьютер.
- Для таблиц и других крупных массивов использовать минимальный тип данных для хранения.
- Данные, которые остаются неизменными, можно объявить константами при помощи слова const перед объявлением переменной.
- Меньше использовать рекурсию. При ее вызове в памяти, называемой стеком, выделяется фрагмент, в котором хранятся различные данные. Если часто вызывать рекурсию, стеки будут занимать большой объем памяти и могут израсходовать ее.
- Неизменяемые строки можно сохранять во флеш-памяти во время работы программы. Для этого используется функция PROGMEM.
На объем памяти не влияют размер имени переменных и комментарии. Компилятор устроен таким образом, что не включает эти данные в скомпилированный скетч.
Для измерения объема занимаемой памяти ОЗУ используется скетч из библиотеки MemoryFree. В ней имеется специальная функция freeMemory, которая возвращает объем доступной памяти. Также эта библиотека широко используется для диагностики проблем, которые связаны с нехваткой памяти.
Оптимизация флеш-памяти. Как только будет окончена процедура компиляции, в окне появится информация о занимаемой памяти кодом. Если скетч занимает большую часть памяти, нужно произвести оптимизацию использования флеш-памяти:
- Использование констант. Аналогично как и для ОЗУ задавать неизменяющиеся значения константами.
- Удалить ненужные Serial.println. Эта команда используется, когда нужно увидеть значения переменных в разных местах программы, нередко эта информация просто не нужна. При этом команды занимают место в памяти, поэтому, убедившись в корректной работе программы, некоторые строки можно удалить.
- Отказ от загрузчика – можно программировать микроконтроллер через контакты ICSP на плате с использованием аппаратных программаторов.
Флеш память является безопасным и удобным способом хранения данных, но некоторые факторы ограничивают ее использование. Для флеш-памяти характерна запись данных блоками по 64 байта. Также флеш-память гарантирует сохранность информации для 100000циклов записи, после чего информация искажается. Во флеш-памяти имеется загрузчик, который нельзя удалять или искажать. Это может привести к разрушению самой платы.
EEPROM память используется для хранения всех данных, которые потребуются после отключения питания. Для записи информации в EEPROM нужно использовать специальную библиотеку EEPROM.h, которая входит в число стандартных библиотек в Arduino IDE. Чтение и запись информации в EEPROM происходит медленно, порядка 3 мс. Также гарантируется надежность хранения данных для 100000 циклов записи, потому лучше не выполнять запись в цикле.
Основные ошибки
Ошибка: «avrdude: stk500_recv(): programmer is not responding»
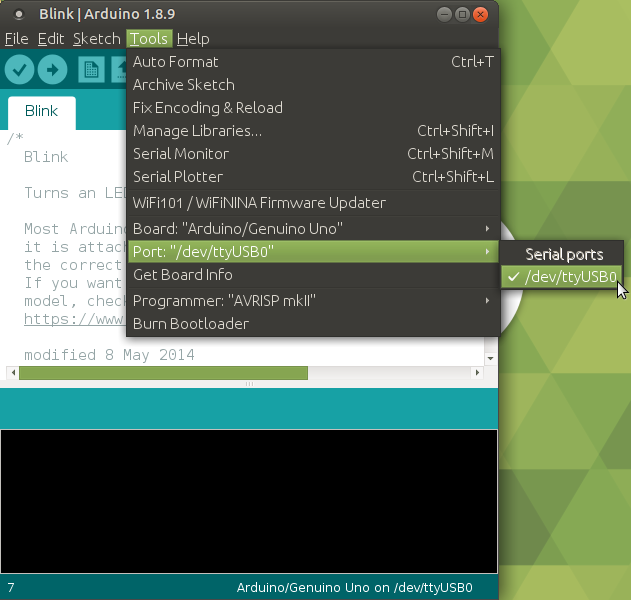
Смотрим какая у нас плата? Какой порт используем? Сообщаем ардуино о правильной плате и порте. Возможно, что используете Nano, а указана Mega. Возможно, что указали неверный порт. Всё это приводит к сообщению: «programmer is not responding».
Решение:
В Arduino IDE в меню «Сервис» выбираем плату. В меню «Сервис → Последовательный порт» выбираем порт.
Ошибка: «a function-definition is not allowed here before ‘{‘ token»
Забыли в коде программы (скетча) закрыть фигурную скобку }.
Решение:
Обычно в Ардуино IDE строка с ошибкой подсвечивается.
Ошибка: «No such file or directory / exit status 1»
Подключаемая библиотека отсутствует в папке libraries.
Решение:
Скачать нужную библиотеку и скопировать её в папку программы — как пример — C:\Program Files\Arduino\libraries. В случае наличия библиотеки — заменить файлы в папке.
Ошибка: «expected initializer before ‘}’ token / expected ‘;’ before ‘}’ token»
Забыли открыть фигурную скобку {, если видим «initializer before». Ошибка «expected ‘;’ before ‘}’ token» — забыли поставить точку с запятой в конце командной строки.
Решение:
Обычно в Ардуино IDE строка с ошибкой подсвечивается.
Ошибка: «… was not declared in this scope»
Arduino IDE видит в коде выражения или символы, которые не являются служебными или не были объявлены переменными.
Решение:
Проверить код на использование неизвестных выражений или лишних символов.
Ошибка компиляции для Arduino Nano, Uno, Mega
Ошибка: avrdude: stk500_recv(): programmer is not responding
Что делать в этом случае? Первым делом обратите внимание какую плату вы используете и к какому порту она подключена (смотри на скриншоте в правом нижнем углу). Необходимо сообщить Arduino IDE, какая плата используется и к какому порту она подключена
Если вы загружаете скетч в Ардуино Nano V3, но при этом в настройках указана плата Uno или Mega 2560, то вы увидите ошибку, как на скриншоте ниже.
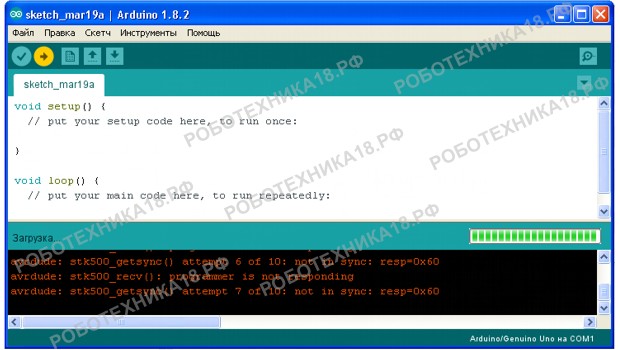
Ошибка Ардуино: programmer is not responding
Такая же ошибка будет возникать, если вы не укажите порт к которому подключена плата (это может быть любой COM-порт, кроме COM1). В обоих случаях вы получите сообщение — плата не отвечает (programmer is not responding). Для исправления ошибки надо на панели инструментов Arduino IDE в меню «Сервис» выбрать нужную плату и там же, через «Сервис» → «Последовательный порт» выбрать порт «COM7».
Ошибка: a function-definition is not allowed here before ‘{‘ token
Это значит, что в скетче вы забыли где-то закрыть фигурную скобку. Синтаксические ошибки IDE тоже распространены и связаны они просто с невнимательностью. Такие проблемы легко решаются, так как Arduino IDE даст вам подсказку, стараясь отметить номер строки, где обнаружена ошибка. На скриншоте видно, что строка с ошибкой подсвечена, а в нижнем левом углу приложения указан номер строки.
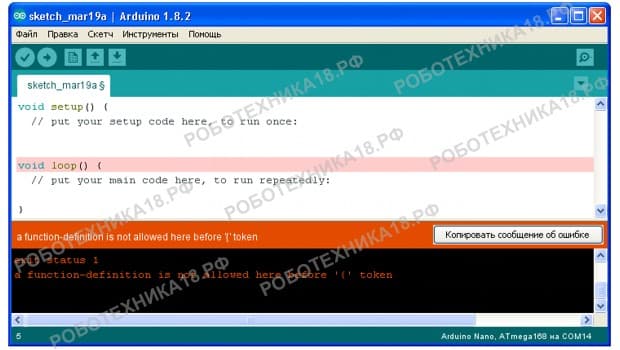
Ошибка: a function-definition is not allowed here before ‘{‘ token
Ошибка: expected initializer before ‘}’ token expected ‘;’ before ‘}’ token
Сообщение expected initializer before ‘}’ token говорит о том, что вы, наоборот где-то забыли открыть фигурную скобку. Arduino IDE даст вам подсказку, но если скетч довольно большой, то вам придется набраться терпения, чтобы найти неточность в коде. Ошибка при компиляции программы: expected ‘;’ before ‘}’ token говорит о том, что вы забыли поставить точку с запятой в конце командной строки.
Ошибка: ‘ ‘ was not declared in this scope
Что за ошибка? Arduino IDE обнаружила в скетче слова, не являющиеся служебными или не были объявлены, как переменные. Например, вы забыли продекларировать переменную или задали переменную ‘DATA’, а затем по невнимательности используете ‘DAT’, которая не была продекларирована. Ошибка was not declared in this scope возникает при появлении в скетче случайных или лишних символов.
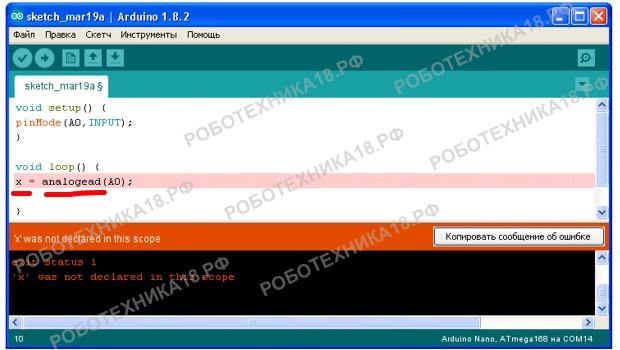
Ошибка Ардуино: was not declared in this scope
Например, на скриншоте выделено, что программист забыл продекларировать переменную ‘x’, а также неправильно написал функцию ‘analogRead’. Такая ошибка может возникнуть, если вы забудете поставить комментарий, написали функцию с ошибкой и т.д. Все ошибки также будут подсвечены, а при нескольких ошибках в скетче, сначала будет предложено исправить первую ошибку, расположенную выше.
Ошибка: No such file or directory exit status 1
Данная ошибка возникает, если вы подключаете в скетче библиотеку, которую не установили в папку libraries. Например, не установлена библиотека ИК приемника Ардуино: fatal error: IRremote.h: No such file or directory. Как исправить ошибку? Скачайте нужную библиотеку и распакуйте архив в папку C:\Program Files\Arduino\libraries. Если библиотека установлена, то попробуйте скачать и заменить библиотеку на новую.
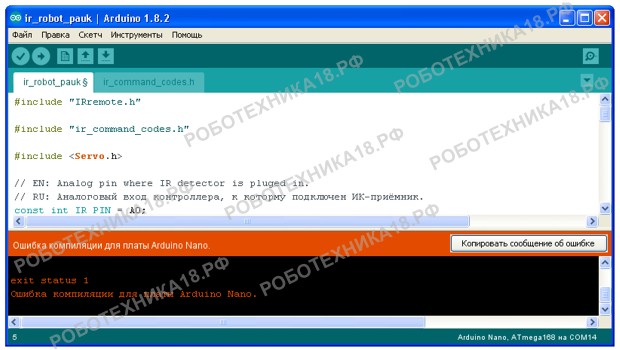
exit status 1 Ошибка компиляции для платы Arduino Nano
Программирование Arduino Shield
Программирование схемы с платой расширения не отличается от обычного программирования ардуино, ведь с точки зрения контроллера мы просто подключили наши устрйоства к его обычным пинам. В скетче нужно указывать те пины, которые соединены в шилде с соответствующими контактами на плате. Как правило, производитель указывает соответствие пинов на самом шилде или в отдельной инструкции по подключению. Если вы скачаете скетчи, рекомендованные самим производителем платы, то даже это делать не понадобится.
Чтение или запись сигналов шилдов производится тоже обычным методом: с помощью функций analogRead (), digitalRead (), digitalWrite () и других, привычных любому ардуинщику команд. В некоторых случаях возможны коллизии, когда вы привыкли к оной схеме соединения, а производитель выбрал другую (например, вы подтягивали кнопку к земле, а на шилде – к питанию). Тут нужно быть просто внимательным.
Define или const
Альтернативой #define является использование констант. Константа в arduino и C++ – это переменная, которая определяется c модификатором const. Пример:
сonst int PIN_LED = 10;
То же самое можно сделать с помощью define:
#define PIN_LED 10
Результат одинаковый – в коде вы просто используете конструкцию типа digitalRead(PIN_LED) и получите желаемое: в нужное место вставится цифра 10.
Но использование константы все-таки предпочтительней по следующим причинам:
- Мы не сможем непреднамеренно разрушить код программы, т.к. константы, в отличие от макросов, не вставляются во все подряд вхождения слова.
- Компилятор сообщит об ошибке, если мы пытаемся использовать константу не того типа/
- На константы действуют общие правила области видимости переменных.
Если оценивать объем памяти необходимой для скетча с использованием #define или const, то никаких преимуществ ни тот, ни другой способ не дают – компилятор выделит одинаковый объем памяти для переменной, объявленной явно или встроенной в виде макроса. Исходя из всего этого, старайтесь при использовании констант в коде все-таки брать за основу const.