Справочник радиолюбителя
Содержание:
Арт-робот на базе Ардуино своими руками
Перевёл alexlevchenko для mozgochiny.ru
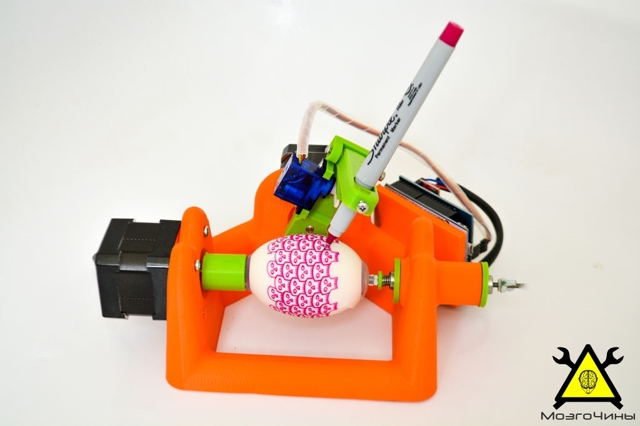
Доброго времени суток! Перед вами, дорогие мозгочины, арт-робот, который может разрисовывать различные сферические или яйцевидные предметы размером от 4 до 9 см.
Для его изготовления понадобится 3D-принтер, набор стандартных инструментов + Arduino.
Примечание: Не стоит ставить крест на проектах, в которых используются 3D-принтер. При желании всегда можно найти место или способ, где можно заказать печать необходимых для проекта деталей.
Шаг 1: Немного о роботе
Арт-робот — двухосевая самоделка, которая может наносить рисунок на большинстве сферических поверхностей. Робот настраивается под определённый тип предмета (шары для пинг-понга, рождественские украшения, лампочки и яйца (утиные, гусиные, куриные …).
Для вращения сферического предмета и перемещения манипулятора используются высокоточные шаговые двигатели с высоким крутящим моментом, а для подъёма механизма ручки — тихий и надежный сервопривод SG90.
Шаг 2: Необходимые детали

Для того, чтобы сделать поделку своими руками нам понадобится:
- 2x подшипника 623;
- Шпилька диаметром 3 мм и длиной 80-90 мм;
- 1x пружина (длиной 10 мм и диаметром 4,5 мм);
- 2x шаговых двигателя NEMA 17 (крутящий момент 4,4 кг / см);
- Кабели для двигателей (длиной 14 + 70 см);
- USB-кабель;
- 1x сервопривод SG90;
- Arduino Leonardo;
- shield JJRobots;

- 2xA4988 драйвера для шаговых двигателей;
- Блок питания 12В / 2A;
- 11x винтов M3 6 мм ;
- 4x винта M3 16 мм;
- 4x гайки M3;
- 2x 20-мм присоски;
- 1x гайка-барашек M3;
- 1x маркер;
- Части напечатанные на 3D-принтере.


В качестве «шпаргалки» можете воспользоваться данной схемой.
Шаг 4: Давайте начинать!
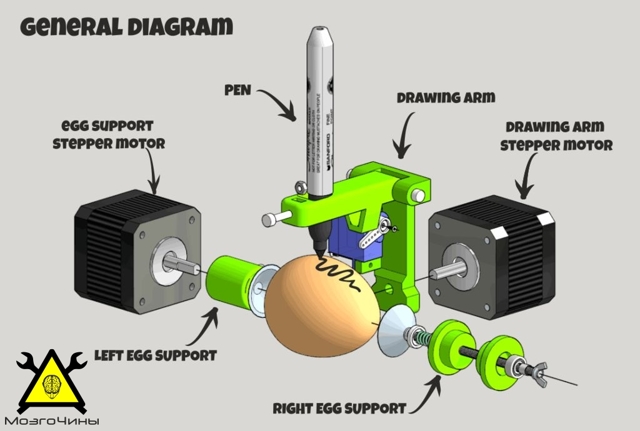
Робот двигает манипулятором, с закрепленным на нём маркером, что приводится в действие шаговым двигателем. Другой шаговый двигатель отвечает за поворот объекта, на который наносится рисунок (яйцо, шарик …). Для удерживания предмета на месте используются две присоски: одна, прикрепленная к шаговому двигателю, а другая на противоположной стороне предмета. Маленькая пружина будет давить на присоску, помогая ей удерживать предмет. Для поднятия/опускания маркера используется сервопривод SG90.
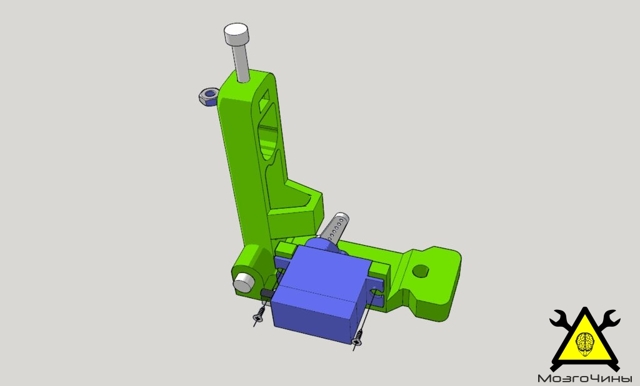
Шаг 5: Манипулятор

Установим гайку в отверстие, подготовленное для неё и закрутим 16 мм винт. Сделаем то же самое для держателя предметов (справа на изображении выше). При создании шарнира для манипулятора использовались 2 16 мм винта. Этот шарнир должен свободно вращаться после закручивания винтов.
Шаг 8: Ось вращения
Разместим все элементы, как показано на изображении выше.
- Присоска;
- Гайка;
- Верхняя часть;
- Пружина;
- Подшипник 623 (должен быть встроен в левую чашку);
- Левая чашка;
- Свободное пространство для основной рамы;
- Правая чашка;
- Подшипник 623;
- Разделительное кольцо;
- Гайка-барашек (M3).
Шаг 9: Размещаем все по своим местам
- Вставим собранный манипулятор на ось шагового двигателя.
- Установим левую опору на ось шагового двигателя.
- Маркер и яйцо установлены в качестве примера (сейчас размещать их не нужно).
ПРИМЕЧАНИЕ: Сервопривод потребует корректировок. Нужно будет повторно установить его угол во время процесса калибровки.
Шаг 10: Электроника
- Закрепим электронику на тыльной стороне основной рамы с помощью винтов (2-х будет достаточно).
- Подключим кабеля.
Если вы перепутаете полярности при подключении шаговых двигателей, то они будут просто вращаться в противоположном направлении, но с сервоприводом ситуация будет не такой уж и безобидной! Поэтому дважды проверяйте полярность перед подключением!
Шаг 11: Программирование Arduino Leonardo
Запрограммируем Arduino Leonardo с помощью программной среды Arduino IDE (v 1.8.1).
- Загрузим Arduino IDE (v 1.8.1) и установим программу;
- Запустим программное обеспечение. Выберем плату Arduino Leonardo и соответствующий COM-ПОРТ в меню «tools-> board»;
- Откроем и загрузим код Sphere-O-Bot. Распакуем все файлы внутрь одной папки и назовём её «Ejjduino_ARDUINO».
Шаг 13: Управление роботом
Программное обеспечение Inkscape. Загрузим и установим программное обеспечение Inkscape (рекомендую стабильную версию 0.91).
Загрузим и установим расширение EggBot Control (версия 2.4.0 была полностью протестирована).
Расширение EggBot Control для Inkscape — это инструмент, который необходимо использовать при тестировании и калибровке EggBot, а также перенесении рисунки на яйцо. Сначала нужно запустить Inkscape.
Выполните резервное копирование и внимательно следуйте инструкциям по установке расширений.
На этом всё, спасибо за внимание!)
Sphere-O-Bot-CODE_ARDUINO — программное обеспечение
Sphere-O-Bot_eggbot_MOD
Руководство по сборке на англ
(A-z Source)
Шаг 7: Установка приложения на телефон.

Сначала перейдите в file -> build settings -> player settings -> и введите любые данные в bundle identifier. Кроме того, убедитесь, что есть данные в поле для описания использования камеры.
Если вы создаете Android-приложение, перейдите к настройкам и переключите свою платформу на Android, снимите Android TV в настройках сборки. Нажмите на — build and run с подключенным телефоном.
Если вы компилируете для iPhone или iPad, обязательно загрузите Xcode из магазина приложений. Также зарегистрируйте бесплатную учетную запись разработчика Apple с сайта www.apple.developer.com. Перейдите в файл и нажмите build. Откройте файл, который был создан из Xcode и подключите ваш телефон. Выберите команду разработчиков и нажмите кнопку запуска.
Шаг 6: Сцена «Камера».

Сначала откройте сцену «Камера». Если Вы посмотрите на сценарий сервера ARCamera, то поймёте что принцип работы в том что берется видео-канал от Vuforia и передает его на компьютер через TCP.
Сцена «контроллера» — это то, что получает видеопоток, а также позволяет использовать клавиши со стрелками для управления роботом. Прежде чем Вы сможете использовать это, убедитесь, что ваш телефон и компьютер подключены к одной и той же сети WIFI. Перейдите в игровой объект videoClient и разместите там IP-адрес вашего телефона. Теперь перейдите на объект игры и введите IP-адрес Node MCU в сценарий отправки сообщения.
Инструкция для запуска сцены не простая, для начала нужно запустить сцену «камеры» на вашем телефоне (мы перейдем к этому позже), а затем, когда она уже запущена, нажмите кнопку воспроизведения на сцене контроллера в редакторе и Вы должны получить контроль над управлением робота. Качество картинки является сверхнизким для производительности, но вы можете изменить его в сценарии сервера сцены «камеры», если хотите.
Руководство по покупке комплектов роботов Arduino
Перед выбором комплектов роботов Arduino, которые удовлетворяют вашим требованиям, необходимо учитывать следующие факторы.
1. Стоимость
Цена является наиболее важным фактором, который вы должны учитывать, когда вы решите приобрести наборы роботов Arduino. Вы должны ориентироваться на ту стоимость, которую вы может себе позволить. Кроме того, проверьте лучшие характеристики, которые предлагает приобретаемый продукт.
Если вы не готовы тратить больше денег, вы можете приобрести набор среднего класса, так же представленные в нашем рейтинге.
2. Умная навигация
В настоящее время все электронные устройства оснащены функцией интеллектуальной навигации. Без этой функции ни один производитель не выпускает продукт на рынке. Это стало очень важным, потому что вы можете просто управлять устройством одним касанием даже в сложные моменты.
Когда вы включаете режим интеллектуальной навигации, робот автоматически начинает двигаться в направлениях влево-вправо, вперед-назад. Он может даже ползать и прыгать, чтобы избегать препятствий, используя интеллектуальные технологии. Конечно эта функция увеличит стоимость робота Arduino.
3. Сборка
Пока мы рассматривали только цену и умную навигацию. Но есть и третий существенный фактор — сборка робота. Например, вы приобрели продукт и не можете с ним справиться или не знаете, как собрать комплект робота, и тогда вы быстро потеряете интерес к роботу и просто выкинете ваши деньги.
Лучшее предложение для вас — когда вы решите купить умный гаджет, особенно тот который требует сборки, получите полное представление об этом устройстве.
Если вы хотите приобрести предмет и не знаете, как его использовать, то покупка не имеет смысла.
4. Список деталей
Вы также должны проверить количество компонентов, представленных в комплекте. Потому что иногда в комплекте могут отсутствовать все необходимые для сборки детали.
Симулятор или эмулятор Arduino?
Давайте сразу договоримся, что в статье мы будем использовать оба этих термина, хотя их значение вовсе не идентично. Симулятором называют устройство или сервис, имитирующие определенные функции другой системы, но не претендующим на создание точной копии. Это некоторая виртуальная среда, в которой мы просто моделируем другую систему. Эмулятор – это полноценный аналог, способный заменить оригинал. Например, Tinkercad симулирует работу электронных схем и контроллера, но при этом он является эмулятором ардуино, реализуя практически все базовые функции Arduino IDE – от среды редактирования и компилятора до монитора порта и подключения библиотек.
С помощью этого класса программ можно не только рисовать электронные схемы, но и виртуально подключать их к электрической цепи с помощью встроенного симулятора. В режиме реального времени можно наблюдать за поведением схемы, проверять и отлаживать ее работоспособность. Если в такой симулятор добавить виртуальнyю плату Arduino, то можно отследить поведение схемы и в ардуино-проектах. Для отладки скетчей во многих известных сервисах присутствует также возможность загрузки настоящих скетчей, которые “загружаются” в модель и заставляют вести схему с подключенными элементами так же, как и со включенной реальной платой. Таким образом, мы сможем эмулировать работу достаточно сложных проектов без физического подключения Arduino, что существенно ускоряет разработку.
Собираем робота
Сначала соберём робота, установим всю механику и электронику.
Собираем платформу
Для начала прикрепим колёса к мотрорам.
Затем с помощью пластиковых П-образных креплений прикручиваем моторчики к платформе
Обратите внимание на взаимное расположение крепления и моторчики: в креплении есть небольшие углубления, так что если всё соединить правильно, то моторчики будут крепко держаться и никуда не выскочат.
Теперь крепим балансировочный шар.
Отлично! Платформа собрана. Если вам кажется, что колёсам отведено слишком мало места и они трутся о платформу, то скорее всего вам нужно посильнее надавить на колёса, чтобы они плотнее сели на вал мотора.
Крепим сенсоры
Закрепим их, как показано на фото:
Можно было бы выбрать и другое место. Это могло бы сделать контроль проще или сложнее, а самого робота более или менее эффективным. Оптимальное расположение — вопрос серии экспериментов. Для этого проекта просто был выбран такой способ крепления.
Крепим Arduino
Arduino закрепим с противоположной стороны двумя винтиками и гайками.
Опять же, можно выбрать и другое место. Например над колёсами, если приподнять Arduino на латунных стойках. Это изменило бы положение центра масс и повлияло бы на эффективность робота в лучшую или худшую сторону.
Крепим Motor Shield и соединительные провода
Установим Motor Shield на Arduino и подсоединим соединительные провода
Обратите внимание, чтобы соотвествовать программному коду из примера ниже, моторчики соединены с Motor Shield так: правый — к клеммам M1 с прямой полярностью (плюс к плюсу), а левый — к M2 с обратной (плюс к минусу)
В этом проекте, для экономии времени концы соединительных проводов просто скручены с контактами моторов. При работе «начисто» стоит жёстко припаять провода к моторам.
Крепим Troyka Shield
Присоединяем сверху Troyka Shield и подключаем датчики к 8 и 9 цифровым контактам. В итоге получаем следующую конструкцию:
Обзор роботов на Arduino для начинающих
Комплекты роботов на Arduino — это универсальное решение для новичков, любителей и инженеров, знакомых с робототехникой и Arduino. Это отличная техническая платформа для запуска и создания мобильных роботов с большим творческим потенциалом.
Для выполнения таких задач вы должны получить некоторую информацию из разных источников, что немного сложно. Решением этой проблемы является покупка комплекта роботов Arduino и постройка их с меньшими усилиями для получения классных результатов. Хороший набор роботов поставляется с четкими инструкциями, поддержкой и экономит ваше время и деньги.
Сегодня на рынке представлено множество роботов работающих на базе Arduino; у каждого свои уникальные аппаратные устройства и технические характеристики. Так как очень трудно выбрать правильный, мы постарались подобрать вам лучшие наборы роботов Arduino, которые предлагают различные компоненты, стоимость, детали проекта, исходный код и многое другое.
Шаг 6: Сцена «Сопровождение».
Следующая сцена – «Сопровождение». Эта сцена использует заданные пользователем объекты Vuforia, поэтому Вы можете создать отслеживаемый объект во время использования, если у него есть достаточное количество точек. В настройках робота следуйте за менеджером, не забудьте указать IP-адрес вашего Node MCU в сценарии отправки сообщения.
Когда Вы откроете эту сцена на своем телефоне, поставьте какой-то предмет перед камерой и щелкните по экрану, чтобы инициализировать новый трекер. Если изображение имеет достаточное количество точек, он скажет, что качество изображения будет высоким, и начнется отслеживание. Я заметил, что при уменьшении мощности аккумулятора — это поведение немного меняется, но, по крайней мере, оно будет работать стабильно какое-то время с новой батареей. Если мы откроем поведение робота, Вы увидите, что этот скрипт проверяет, находится ли текущий целевой объект изображения в определенном наборе границ, и если он не видит объект, то отправляет команду роботу для перемещения для одного кадра перед остановкой. Движения робота из-за этого не плавные, но движения робота работают довольно прилично.
Где купить платформу и запчасти
Все, о чем говорится в этой статье, можно без проблем купить на всем известном сайте. К сожалению, подавляющее большинство предложений основываются на стандартной платформе 4WD автомобиля с двумя несущими планками, не очень надежными двигателями и колесами, любящими ездить в “развалочку”. Но эти варианты относительно не дороги и вполне подойдут для начала работы.
Платформа Ардуино 4WD с двигателями, колесами и рамой без электронных компонентов
4WD платформа для Ардуино с необычным видом крепления элементов
Конструктор машинки Ардуино на платформе 4WD с пультом управления Bluetooth и PS2
Типовой набор 4WD машинки с Ардуино, шилдами и основными датчиками