Boolean data type
Содержание:
- Pascal, Ada, and Haskell
- Generalities
- Introduction: Fast DigitalRead(), DigitalWrite() for Arduino
- Несколько булевых переменных
- Digital Pins
- Boolean operator examples
- Решение
- Booleans used in programming
- Функции с возвращаемыми значениями
- Реализация в различных языках программирования
- Одна булева переменная и три состояния
Pascal, Ada, and Haskell
The language Pascal (1970) introduced the concept of programmer-defined enumerated types. A built-in data type was then provided as a predefined enumerated type with values and . By definition, all comparisons, logical operations, and conditional statements applied to and/or yielded values. Otherwise, the type had all the facilities which were available for enumerated types in general, such as ordering and use as indices. In contrast, converting between s and integers (or any other types) still required explicit tests or function calls, as in ALGOL 60. This approach (Boolean is an enumerated type) was adopted by most later languages which had enumerated types, such as Modula, Ada, and Haskell.
Generalities
In programming languages with a built-in Boolean data type, such as Pascal and Java, the comparison operators such as and are usually defined to return a Boolean value. Conditional and iterative commands may be defined to test Boolean-valued expressions.
Languages with no explicit Boolean data type, like and Lisp, may still represent truth values by some other data type. Common Lisp uses an empty list for false, and any other value for true. The C programming language uses an integer type, where relational expressions like and logical expressions connected by and are defined to have value 1 if true and 0 if false, whereas the test parts of , , , etc., treat any non-zero value as true. Indeed, a Boolean variable may be regarded (and implemented) as a numerical variable with one binary digit (bit), which can store only two values. The implementation of Booleans in computers are most likely represented as a full word, rather than a bit; this is usually due to the ways computers transfer blocks of information.
Most programming languages, even those with no explicit Boolean type, have support for Boolean algebraic operations such as conjunction (, , ), disjunction (, , ), equivalence (, , ), exclusive or/non-equivalence (, , , ), and negation (, , ).
In some languages, like Ruby, Smalltalk, and Alice the true and false values belong to separate classes, i.e., and , respectively, so there is no one Boolean type.
In SQL, which uses a three-valued logic for explicit comparisons because of its special treatment of Nulls, the Boolean data type (introduced in SQL:1999) is also defined to include more than two truth values, so that SQL Booleans can store all logical values resulting from the evaluation of predicates in SQL. A column of Boolean type can also be restricted to just and though.
Introduction: Fast DigitalRead(), DigitalWrite() for Arduino
By JRV31Follow
More by the author:
About: Jack passed away May 20, 2018 after a long battle with cancer. His Instructables site will be kept active and questions will be answered by our son-in-law, Terry Pilling. Most of Jack’s instructables are tu…
More About JRV31 »
It is possible to use lower level commands to greatly speed up the input/output.
There are three banks of pins on the Atmega 328 and 168 microcontrollers called B, C, and D.
- The B bank is digital pins 8 — 13.
- The C bank is the analog input pins.
- Bank D is pins 0 — 7.
Each bank of pins has three 8 bit registers used to control it:
- The DDR register is the data direction, 0 = input, 1 = output.
- The PIN register is used to read the digital value of the pin.
- The PORT register has two functions:
- If the DDR register is set to output 0 sets the pin low and 1 sets it high.
- If the DDR register is set to input 1 turns on the internal pull-up resistor.
Несколько булевых переменных
В итоге команда решает расширить сигнатуру предыдущей функции, добавив два булевых параметра для новых состояний:
И вот какие проблемы их поджидают.
Появление скрытых зависимостей
Простое с виду расширение перечня добавит скрытые зависимости и новые комбинации состояний.
Теперь будет две скрытые зависимости: — и —. Придётся обрабатывать дополнительные условия, чтобы избежать конфликтующих состояний. Например, пользователь со статусом или не может быть со статусом. Примеры таких условий:
Если включить больше статусов, функции превратятся в длинный список параметров, а логика станет сложной, полной условий для обработки зависимых друг от друга значений.
Проблемы с безопасностью и читаемостью
Использование нескольких булевых переменных также влечёт за собой путаницу, которая обернётся кошмаром на этапе рефакторинга и написания модульных тестов. При вызове функции, которой передаются значения логических переменных, легко перепутать, какая из переменных за что отвечает:
Да, многие языки программирования поддерживают именованные аргументы, которые позволяют улучшить читаемость функций. Но вы всё равно не застрахованы от передачи неправильного логического значения, а компилятор даже не сочтёт это за ошибку.
Группа разработчиков из примера избежит перечисленных проблем, если вместо Boolean использует Enum.
Digital Pins
The pins on the Arduino can be configured as either inputs or outputs. This document explains the functioning of the pins in those modes. While the title of this document refers to digital pins, it is important to note that vast majority of Arduino (Atmega) analog pins, may be configured, and used, in exactly the same manner as digital pins.
Properties of Pins Configured as INPUT
This also means however, that pins configured as pinMode(pin, INPUT) with nothing connected to them, or with wires connected to them that are not connected to other circuits, will report seemingly random changes in pin state, picking up electrical noise from the environment, or capacitively coupling the state of a nearby pin.
Pullup Resistors with pins configured as INPUT
Often it is useful to steer an input pin to a known state if no input is present. This can be done by adding a pullup resistor (to +5V), or a pulldown resistor (resistor to ground) on the input. A 10K resistor is a good value for a pullup or pulldown resistor.
Properties of Pins Configured as INPUT_PULLUP
There are 20K pullup resistors built into the Atmega chip that can be accessed from software. These built-in pullup resistors are accessed by setting the pinMode() as INPUT_PULLUP. This effectively inverts the behavior of the INPUT mode, where HIGH means the sensor is off, and LOW means the sensor is on.
The value of this pullup depends on the microcontroller used. On most AVR-based boards, the value is guaranteed to be between 20kΩ and 50kΩ. On the Arduino Due, it is between 50kΩ and 150kΩ. For the exact value, consult the datasheet of the microcontroller on your board.
When connecting a sensor to a pin configured with INPUT_PULLUP, the other end should be connected to ground. In the case of a simple switch, this causes the pin to read HIGH when the switch is open, and LOW when the switch is pressed.
The pullup resistors provide enough current to dimly light an LED connected to a pin that has been configured as an input. If LEDs in a project seem to be working, but very dimly, this is likely what is going on.
The pullup resistors are controlled by the same registers (internal chip memory locations) that control whether a pin is HIGH or LOW. Consequently, a pin that is configured to have pullup resistors turned on when the pin is an INPUT, will have the pin configured as HIGH if the pin is then switched to an OUTPUT with pinMode(). This works in the other direction as well, and an output pin that is left in a HIGH state will have the pullup resistors set if switched to an input with pinMode().
Prior to Arduino 1.0.1, it was possible to configure the internal pull-ups in the following manner:
pinMode(pin, INPUT); // set pin to input digitalWrite(pin, HIGH); // turn on pullup resistors
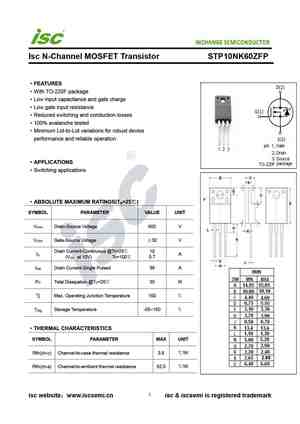
NOTE: Digital pin 13 is harder to use as a digital input than the other digital pins because it has an LED and resistor attached to it that’s soldered to the board on most boards. If you enable its internal 20k pull-up resistor, it will hang at around 1.7V instead of the expected 5V because the onboard LED and series resistor pull the voltage level down, meaning it always returns LOW. If you must use pin 13 as a digital input, set its pinMode() to INPUT and use an external pull down resistor.
Properties of Pins Configured as OUTPUT
Pins configured as OUTPUT with pinMode() are said to be in a low-impedance state. This means that they can provide a substantial amount of current to other circuits. Atmega pins can source (provide positive current) or sink (provide negative current) up to 40 mA (milliamps) of current to other devices/circuits. This is enough current to brightly light up an LED (don’t forget the series resistor), or run many sensors, for example, but not enough current to run most relays, solenoids, or motors.
Short circuits on Arduino pins, or attempting to run high current devices from them, can damage or destroy the output transistors in the pin, or damage the entire Atmega chip. Often this will result in a «dead» pin in the microcontroller but the remaining chip will still function adequately. For this reason it is a good idea to connect OUTPUT pins to other devices with 470Ω or 1k resistors, unless maximum current draw from the pins is required for a particular application.
Boolean operator examples
A boolean operator, or logical operator, consists of operators such as AND, OR, NOT, NOR, NAND, and XOR. These operators are used with conditional statements in programming, search engines, algorithms, and formulas.
Below is an example chart that helps explain the Boolean operations even more by detailing each of the different Boolean situations.
Example data = "Computer Hope is a location to find free computer help and information."
| Boolean | Value_1 | Value_2 | Explanation | Results |
|---|---|---|---|---|
| AND | Free | Help | Because the above example data contains both «free» and «help» the results would be TRUE. | TRUE |
| AND | Expensive | Help | Although the above example does have «help,» it does not contain «expensive,» which makes the result FALSE. | FALSE |
| OR | Free | Help | The above example data has both «free» and «help,» but the OR Boolean only requires one or the other, which makes this TRUE. | TRUE |
| OR | Expensive | Help | Although «expensive» is not in the example data, it still does contain «help,» which makes the TRUE. | TRUE |
| NOT | Free | The above example does contain «free,» which makes the result FALSE. | FALSE | |
| NOT | Expensive | The above example does not contain «expensive,» which makes the result TRUE. | TRUE | |
| XOR | Free | Help | The above example contains both «free» and «help,» the XOR Boolean only requires one or the other, but not both, making this FALSE. | FALSE |
| XOR | Expensive | Help | The above example does not contain «expensive» but does contain «help,» which makes this TRUE. | TRUE |
For a detailed explanation of how each of these operations works in hardware and software, see our logic operations overview.
Решение
Используется в определении переменной, средства это указатель Значение, которое оно хранит, является адресом в памяти для другой переменной или части другой переменной. В этом случае указатель на блок памяти внутри и из названий переменных это строка на изображении. Поскольку тип это берет что угодно и использует его как блок отдельных байтов.
Используется вне приемлемого определения, принимает другое значение: разыменование указателя. Перейти к месту в памяти, хранящемся в указателе, и получить значение.
И да, может также использоваться для умножения, повышая уровень веселья чтения кода.
Увеличение () указатель перемещает адрес на следующий адрес. Если бы у вас был адрес будет увеличен на 4, чтобы указать на следующий , В этом случае мы имеем , поэтому адрес передается на один байт. Так
А) Получить значение по указателю.
После A) Продвиньте указатель.
После A) Присвойте значение r.
Точно, где стадия «продвижения указателя» идет, является хитрым. Это происходит после шага A. В C ++ 17 или выше это происходит до «Присвоить значение», потому что теперь есть разделение между материалом справа и материалом слева от знака равенства. Но до C ++ 17 все, что мы можем сказать, это после шага А. Поиск ключевого слова: «Точки последовательности».
Сделайте это снова, получите и назначьте текущее значение в , продвиньте указатель.
Я полагаю, что из названия я присваиваю пикселю цвета, указанные выше.
Ты не можешь просто
Из-за последовательности снова. Нет гарантий порядка, в котором будут вычисляться параметры. Это позволяет разработчикам компиляторов оптимизировать скорость и размер, чего они не могут, если указан порядок, но это удар по зубам тем, кто ожидает разрешения слева направо. Насколько я понимаю, это все еще верно в стандарте C ++ 17.
ХОРОШО. Так что же это делает?
Существует большой блок памяти, из которого вы хотите одну и только одну строку.
точно определяет начало этой строки и устанавливает его так, чтобы он обрабатывался как немой массив байтов.
общий петля. Для всех пикселей на линейке светодиодов.
Получите цвет одного пикселя на линии в стандартном 8-битном формате RGB и укажите на следующий пиксель
записывает прочитанный цвет в один пиксель.
Затем цикл будет повторяться и начнет работать со следующим пикселем, пока в строке не останется больше пикселей.
1
Booleans used in programming
In programming, a boolean can be used with conditional statements (e.g., if statement), as shown in the following example using Perl.
use strict;
my ($name, $password);
print "\nName: ";
chomp($name = <STDIN>);
print "\nPassword: ";
chomp($password = <STDIN>);
if (($name eq "bob") && ($password eq "example")) {
print "Success\n";
}
else {
print "Fail\n";
die;
}
The above if statement looks for a username equal to «bob» and password equal to «example». If either the name or password is not correct, the program prints «Fail» and terminates.
Ampersand, Bitwise operators, Computer acronyms, Conditional statement, Data structure, Data type, False, Operator, Programming terms, True, XOR
Функции с возвращаемыми значениями
До сих пор мы использовали только переменные, которые так или иначе зависели
только от номера вызова функции , т.е. так или иначе зависящие от
времени, прошедшего с момента старта Arduino.
Это интересно, но не даёт таких возможностей к написанию программ, как
получение значений из-вне. Допустим, к Arduino подключён какой-то сенсор:
датчик освещённости, датчик газа, простой потенциометр или что-то ещё. Как
получить его показания и использовать их в программе для чего-то полезного?
Если говорить о сенсорах с аналоговым сигналом, для
получения показаний с них существует встроенная функция .
Давайте воспользуемся ей, чтобы сделать программу для устройства, которое
изменяет яркость свечения светодиода, подключённого к 5-му пину в зависимости
от поворота ручки потенциометра, подключённого к пину .
#define LED_PIN 5
#define POT_PIN A0
void setup()
{
pinMode(LED_PIN, OUTPUT);
}
void loop()
{
int value = analogRead(POT_PIN);
analogWrite(LED_PIN, value 4);
}
Первое, что мы видим — это макроопределение пина с потенциометром:
#define POT_PIN A0
В качестве значения используется не просто число, а нечто с именем . Оно
написано большими буквами, поэтому можно предположить, что это встроенное
макроопределение. И это действительно так! для Arduino Uno, например,
определено как . Для других плат значение может быть другим. Мы не
хотим помнить об этих тонкостях, поэтому просто использовали . Это
всегда означает «нулевой аналоговый вход».
Таким образом в качестве значения макроопределения мы использовали другое
макроопределение. Так делать можно и это довольно распространённая практика.
Теперь рассмотрим . В первой строке определяется переменная ,
а в качестве значения ей присваивается значения выражения
. Но ведь это вызов функции, а не арифметическое
выражение!
Совершенно верно. Некоторые функции помимо того, что делают что-то полезное
умеют так же возвращать значение обратно, в вызывающий код. Функции вроде
или не возвращают ничего, по задумке их автора, а
вот возвращает некоторое целочисленное значение.
Чтобы понять какие аргументы функция принимает, возвращает ли она что-нибудь и
если возвращает, то что, следует обращаться к документации на эту функцию.
Что касается , она принимает один аргумент: номер пина, с
которого необходимо считать значение аналогового сигнала. А возвращает эта
функция значение от 0 до 1023, где:
-
Входное напряжение в 0 В возвращается как
-
2 В возвращается как
-
2,5 В возвращается как
-
И так далее, до напряжения в 5 В, которому ставится в соответствие
Таким образом в первой строке мы просто считываем сигнал с
потенциометра, получая угол поворота его ручки в виде целого числа в пределах
от 0 до 1023.
Как мы помним, функция , которой мы пользуемся для управления
яркостью светодиода ожидает целое число от 0 до 255 в качестве второго
аргумента. Но у нас оказалась переменная с другим диапазоном. Что делать?
Просто поделить значение на 4. Так наш диапазон будет смасштабирован до того,
который подходит для . Максимуму из одного диапазона равному 1023
станет соответствовать максимум из другого диапазона: 1023 / 4 = 255.
Вспоминая о компактной записи, мы можем сделать наш чуть лаконичнее:
void loop()
{
analogWrite(LED_PIN, analogRead(POT_PIN) 4);
}
Итак, вы научились работать со сложными выражениями, макроопределениями и
переменными. Использовать функции с возвращаемыми значениями и встраивать
вычисления. Этих знаний уже достаточно для создания нехитрых устройств.
Пробуйте, экспериментируйте, учитесь!
Реализация в различных языках программирования
Ada
Язык программирования Ada определяет в пакете Standard как нумерованный тип со значениями и в котором < .
type Boolean is (False, True); p Boolean := True; if p then ... end if;
Родственные операторы (, , , , , ) применяются ко всем нумерованым типам, включая . Булевы операторы , , и применимы к типу и любым объявленным подтипам. Булевы операторы также применимы к массивам, содержащим значения .
Algol
Algol 60 имеет тип данных и соответствующие операторы, установленные в спецификации Algol 60. Тип данных был сокращён до в ALGOL 68.
C
В языке программирования C, который не предоставлял булевых значений в (но вводит в ) вместо значений true/false было установлено сравнение значения с нулём. Для примера, код:
if (bool_variable) printf("True!\n");
else printf("False!\n");
равнозначен коду:
if (bool_variable != ) printf("True!\n");
else printf("False!\n");
Это было честно для целочисленного типа данных (integer); тем не менее, бинарные значения чисел с плавающей запятой (floating-point) были приближёнными к выводимым на экран десятичным значениям, и это давало ошибки при сравнении. Традиционно, целое содержало одну (или более) булеву переменную (одну на каждый разряд целого).
Haskell
В языке Haskell булев тип данных реализован как простейший алгебраический тип данных:
data Bool = False | True
В стандартном модуле для него определены функции , и .
Python
В языке Python булев тип данных обозначается как , для приведения других типов данных к булеву существует функция , работающая по следующим соглашениям:
- строки: пустая строка — ложь, непустая строка — истина;
- числа: нулевое число — ложь, ненулевое число (в том числе и меньшее единицы) — истина;
- списки и кортежи: пустой список (кортеж) — ложь, непустой (даже содержащий один элемент, например пустой кортеж) — истина;
- функции — всегда истина.
Для других объектов результат рассчитывается через метод , который в идеале должен возвращать значения или .
Булев тип приводится к следующим типам данных:
- строковый: для истины, для лжи;
- числовой (встроенные типы и ): 1 для истины, 0 для лжи.
К другим типам данных булев тип не приводится.
В Python 2.6 есть интересная особенность — можно переопределить значение на и наоборот, написав всего лишь:
True = False
или, вариант для всей области видимости
__builtins__.True = False
что может привести к весьма неожиданному поведению интерпретатора или IDLE. В Python 3 данная возможность была ликвидирована — и считаются зарезервированными, как и слово .
Pascal
Описание переменных:
var a, b Boolean
Арифметические операции над булевыми недопустимы, но допустимы логические операции: Not, And, Or, Xor, операции отношения = (равно), <> (не равно) и функции Ord, Pred, Succ.
var
A, B Byte;
C, D, E, F Boolean;
begin
A := Ord(False); {A=0}
B := Ord(True); {B=1}
C := Pred(False); {ошибка}
D := Pred(True); {D=False}
E := Succ(False); {E=True}
F := Succ(True); {ошибка}
end.
Ruby
В Ruby булев тип представлен двумя предопределенными переменными: и . Появляется логический тип в результате логических операций или вызова логических методов. По традиции, имя логических методов (то есть методов, которые возвращают значение true или false) заканчивается на «?».
В качестве может выступать , а в качестве — любой объект, в том числе переменная со значением «0» или пустая строка, что часто является неожиданностью для новичков.
Одна булева переменная и три состояния
Boolean обычно принимает два значения. Но в некоторых языках, таких как Java, где у примитивных типов есть классы обёртки, можно использовать для присвоения третьего состояния. В нашем примере для определения статуса будет использовано значение .
Хотя это и кажется подходящим решением, при работе с такой булевой переменной команда разработчиков рискует напарываться на исключение .
Кроме того, в некоторых сценариях будет сложно отличить от . Возьмём, к примеру, свойство . Значение будет чётко указывать на то, что игра запущена. Но что если значение равно или ? означает, что игра на паузе или остановлена? А на что в таком случае указывает ?
Как видите, значение недостаточно информативно, и наличие третьего состояния, привязанного к, только усложнит логику кода.
К тому же, что произойдёт, если разработчиков попросят добавить ещё один статус —? Становится понятно, что способ с использованием одной булевой переменной не подходит.