Мощность электродвигателя: формула, правила расчета, виды и классификация электродвигателей
Содержание:
- Практические измерения
- Пуск в ход асинхронных двигателей
- Нагрузка насосов и типы нагрузки электродвигателя
- Однофазный электродвигатель с пуском через сопротивление/работа через обмотку (индуктивность) (RSIR)
- Параметры электродвигателя №2: потребляемый ток
- СКОЛЬЖЕНИЕ РОТОРА
- Ремонт обмоток якорей
- Основные режимы работы электродвигателей
- Принцип действия теплового автоматического выключателя
- Как рассчитать частотник под двигатель
- Параметры и режимы работы
Практические измерения
Самый доступный способ – проверка показаний бытового счетчика электроэнергии. Сначала следует отключить абсолютно все бытовые приборы и выключить свет во всех помещениях, поскольку даже горящая лампочка на 40Вт будет искажать показания. Проследите, чтобы счетчик не крутился или индикатор не мигал (в зависимости от его модели). Вам повезло, если у вас счетчик «Меркурий» — он показывает величину нагрузки в кВт, поэтому от вас потребуется только включить двигатель на 5 минут на полную мощность и проверить показания.
Индукционные счетчики ведут учет в кВт/ч. Запишите показания до включения мотора, дайте ему поработать ровно 10 минут (лучше воспользоваться секундомером). Снимите новые показания счетчика и путем вычитания узнайте разницу. Умножьте эту цифру на 6. Полученный результат отображает мощность двигателя в кВт.
Если двигатель маломощный, вычислить параметры будет несколько сложнее. Выясните, сколько оборотов (или импульсов) равно 1кВт/ч – информацию вы найдете на счетчике. Допустим, это 1600 оборотов (или вспышек индикатора). Если при работающем двигателе счетчик делает 20 оборотов в минуту, умножьте эту цифру на 60 (количество минут в часу). Получается 1200 оборотов в час. Разделите 1600 на 1200 (1.3) – это и есть мощность двигателя. Результат тем точнее, чем дольше вы измеряете показания, но небольшая погрешность все равно присутствует.
Пуск в ход асинхронных двигателей
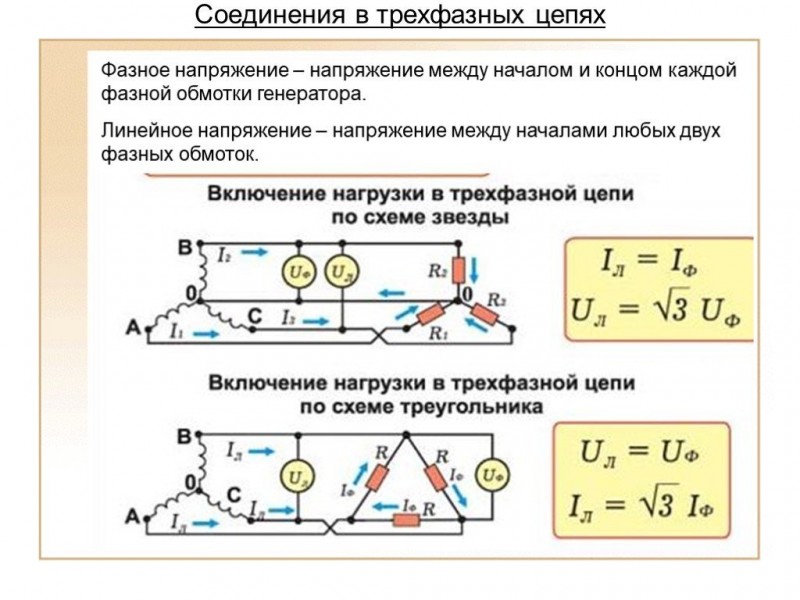
Выводы обмоток статора А, В, С, X, Y, Z подключаются на клеммник двигателя, где согласно стандарту они обозначаются: начала С1, С2, С3, и соответственно концы С4, С5, С6. Выводы располагаются так, чтобы их было удобно соединять в звезду или в треугольник, как показано на рис. 21.
Обмотки каждой фазы статора рассчитаны на определенное фазное напряжение Uф. Поэтому, соединяя обмотку в звезду или в треугольник, можно присоединять двигатель к сетям с напряжением, отличающимся в √3 раз. Например, если Uф = 127 В, то при соединении статора
в треугольник подключают его к сети с напряже
нием UL = 220 В. Если UL = 380 В (Uф = 220 В), то обмотки статора соединяют в звезду.
Асинхронный двигатель с фазным ротором запускается при помощи реостата, включаемого в цепь ротора (рис. 22). Сопротивление реостата 1, подключается к кольцам ротора 2 при помощи щеток 3.
Рис. 21. Расположение зажимов обмотки статора
Наибольшая величина сопротивления соответствует положению
«пуск». По мере разгона ротора непрерывно уменьшаются его э.д.с. и ток. Это позволяет уменьшать сопротивление реостата 1, передвигая ступенями подвижные контакты 5. К концу пуска ротор оказывается замкнутым накоротко «ход». Реостат рассчитан только на время пуска двигателя.
Асинхронный двигатель с короткозамкнутым ротором — его пуск производится прямым включением в сеть. Недостатком такого способа пуска является значительный пусковой ток (4,5—6,5)IН при относительно малом пусковом моменте
Мп=(1Р1,6)Мн.
Рис. 22. Схема асинхронного двигателя с фазным ротором
Двигатели очень малой мощности имеют круглые пазы (рис. 23а). У двигателей мощностью более 2—3 кВт пазы ротора имеют форму, показанную на рис. 23б, а при мощности более 20—30 кВт еще более глубокие. Эти пазы заливают расплавленным алюминием. При мощностях двигателей более 120—150 кВт пазы выполняют в виде глубокой щели (рис. 23в) и в них закладывают узкие высокие медные стержни.
Смысл применения глубоких пазов заключается в следующем. В первое
мгновение пуска, когда f2= f1, провод, лежащий в глубоком пазу, охватывается магнитными линиями так, как показано на рис. 9.23в. часть провода 1, находящаяся у дна паза, охвачена наибольшим числом линий, а части 2, 3, 4 тем меньшим, чем дальше они от дна паза. Поэтому индуктивное сопротивление нижних слоев металла провода значительно больше, чем верхних, и при f2 = f1 весь ток ротора оттесняется к поверхности паза. При этом сечение провода используется не полностью, активное сопротивление обмотки ротора увеличивается и пусковой момент становится большим. Одновременно уменьшается пусковой ток обмотки статора. По мере разгона ротора частота f2
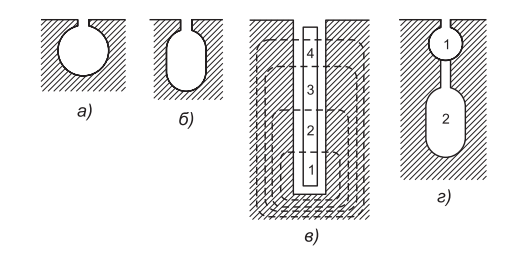
Рис. 23. Пазы роторов асинхронных двигателей
шается, явление вытеснения тока прекращается и сопротивление обмотки ротора автоматически уменьшается. Аналогично работает двигатель с двойным пазом (рис. 23г).
Для понижения пускового тока двигателей с короткозамкнутым ротором, работающих при соединении статора в треугольник, часто применяется схема переключения статора на звезду в первом этапе пуска (рис. 24). Если замкнуть ножи переключателя 2 вниз и затем подать напряжение, то напряжение на фазу будет в 3 раз меньше номинального, а ток уменьшится в 3 раза. Когда ротор пришел во вращение, ножи переключателя перекидываются вверх и двигатель работает при номинальном напряжении. Такой пуск вызывает уменьшение пускового момента примерно в 3 раза, и может применяться только там, где двигатель пускается почти вхолостую.
Рис. 24. Схема пуска двигателя переключением статора со звезды на треугольник
Нагрузка насосов и типы нагрузки электродвигателя
Выделяют следующие типы нагрузок:
Постоянная мощность
Термин «постоянная мощность» используется для определённых типов нагрузки, в которых требуется меньший вращающий момент при увеличении скорости вращения, и наоборот. Нагрузки при постоянной мощности обычно применяются в металлообработке, например, сверлении, прокатке и т.п.
Постоянный вращающий момент
Как видно из названия — «постоянный вращающий момент» — подразумевается, что величина вращающего момента, необходимого для приведения в действие какого- либо механизма, постоянна, независимо от скорости вращения. Примером такого режима работы могут служить конвейеры.
Переменный вращающий момент и мощность
«Переменный вращающий момент» — эта категория представляет для нас наибольший интерес. Этот момент имеет отношение к нагрузкам, для которых требуется низкий вращающий момент при низкой частоте вращения, а при увеличении скорости вращения требуется более высокий вращающий момент. Типичным примером являются центробежные насосы.
Вся остальная часть данного раздела будет посвящена исключительно переменному вращающему моменту и мощности.
Определив, что для центробежных насосов типичным является переменный вращающий момент, мы должны проанализировать и оценить некоторые характеристики центробежного насоса. Использование приводов с переменной частотой вращения обусловлено особыми законами физики. В данном случае это законы подобия, которые описывают соотношение между разностями давления и расходами.
Во-первых, подача насоса прямо пропорциональна частоте вращения. Это означает, что если насос будет работать с частотой вращения на 25% больше, подача увеличится на 25%.
Во-вторых, напор насоса будет меняться пропорционально квадрату изменения скорости вращения. Если частота вращения увеличивается на 25%, напор возрастает на 56%.
В-третьих, что особенно интересно, мощность пропорциональна кубу изменения скорости вращения. Это означает, что если требуемая частота вращения уменьшается на 50%, это равняется 87,5%-ному уменьшению потребляемой мощности.
Итак, законы подобия объясняют, почему использование приводов с переменной частотой вращения более целесообразно в тех областях применения, где требуются переменные значения расхода и давления. Grundfos предлагает ряд электродвигателей со встроенным частотным преобразователем, который регулирует частоту вращения для достижения именно этой цели.
Так же как подача, давление и мощность, потребная величина вращающего момента зависит от скорости вращения.
На рисунке показан центробежный насос в разрезе. Требования к вращающему моменту для такого типа нагрузки почти противоположны требованиям при «постоянной мощности». Для нагрузок при переменном вращающем моменте потребный вращающий момент при низкой частоте вращения — мал, а потребный вращающий момент при высокой частоте вращения — велик. В математическом выражении вращающий момент пропорционален квадрату скорости вращения, а мощность — кубу скорости вращения.
Это можно проиллюстрировать на примере характеристики вращающий момент/частота вращения, которую мы использовали ранее, когда рассказывали о вращающем моменте электродвигателя:
Когда электродвигатель набирает скорость от нуля до номинальной скорости, вращающий момент может значительно меняться. Величина вращающего момента, необходимая при определённой нагрузке, также изменяется с частотой вращения. Чтобы электродвигатель подходил для определённой нагрузки, необходимо чтобы величина вращающего момента электродвигателя всегда превышала вращающий момент, необходимый для данной нагрузки.
В примере, центробежный насос при номинальной нагрузке имеет вращающий момент, равный 70 Нм, что соответствует 22 кВт при номинальной частоте вращения 3000 мин-1. В данном случае насосу при пуске требуется 20% вращающего момента при номинальной нагрузке, т.е. приблизительно 14 Нм. После пуска вращающий момент немного падает, а затем, по мере того, как насос набирает скорость, увеличивается до величины полной нагрузки.
Очевидно, что нам необходим насос, который будет обеспечивать требуемые значения расход/напор (Q/H). Это значит, что нельзя допускать остановок электродвигателя, кроме того, электродвигатель должен постоянно ускоряться до тех пор, пока не достигнет номинальной скорости. Следовательно, необходимо, чтобы характеристика вращающего момента совпадала или превышала характеристику нагрузки на всём диапазоне от 0% до 100% скорости вращения. Любой «избыточный» момент, т.е. разница между кривой нагрузки и кривой электродвигателя, используется как ускорение вращения.
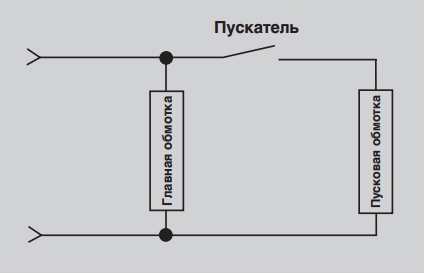
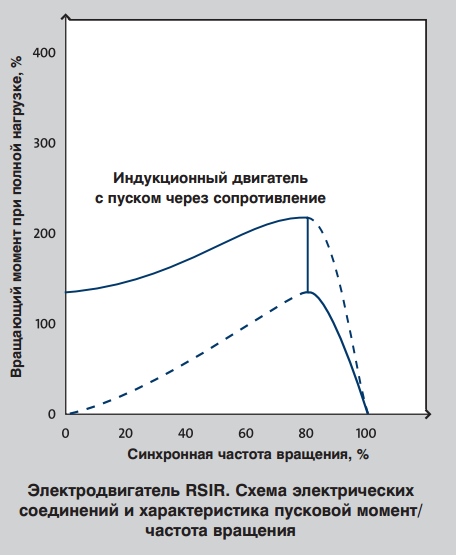
Однофазный электродвигатель с пуском через сопротивление/работа через обмотку (индуктивность) (RSIR)
Данный тип двигателей ещё известен как «электродвигатели с расщеплённой фазой». Они, как правило, дешевле однофазных электродвигателей других типов, используемых в промышленности, но у них также есть некоторые ограничения по производительности.
Пусковое устройство электродвигателей RSIR включает в себя две отдельные обмотки статора. Одна из них используется исключительно для пуска, диаметр проволоки данной обмотки меньше, а электрическое сопротивление — выше, чем у главных обмоток. Это вызывает отставание вращающегося поля, что, в свою очередь, приводит в движение двигатель. Центробежный или электронный пускатель отсоединяет пусковую обмотку, когда частота вращения двигателя достигает, приблизительно, 75% от номинальной величины. После этого электродвигатель продолжит работу в соответствии со стандартными принципами действия индукционного электродвигателя.
Как уже говорилось раньше, для электродвигателей RSIR есть некоторые ограничения. У них низкие пусковые моменты, часто в диапазоне от 50 до 150 процентов от номинальной нагрузки. Кроме того, электродвигатель создаёт высокие пусковые токи, приблизительно от 700 до 1000% от номинального тока. В результате продолжительное время пуска будет вызывать перегрев и разрушение пусковой обмотки. Это означает, что электродвигатели данного типа нельзя использовать там, где необходимы большие пусковые моменты.
Электродвигатели RSIR рассчитаны на узкий диапазон напряжения питания, что, естественно, ограничивает области их применения. Их максимальные вращающие моменты варьируются в пределах от 100 до 250% от расчетной величины. Необходимо также отметить, что дополнительной трудностью является установка тепловой защиты, так как довольно сложно найти защитное устройство, которое срабатывало бы достаточно быстро, чтобы не допустить прогорания пусковой обмотки. Электродвигатели RSIR подходят для использования в небольших приборах для рубки и перемалывания, вентиляторах, а также для применения в других областях, в которых допускается низкий пусковой момент и требуемая выходная мощность на валу от 0,06 кВт до 0,25 кВт. Они не используются там, где должны быть высокие вращающие моменты или продолжительные циклы.
Параметры электродвигателя №2: потребляемый ток
Для измерения тока, потребляемого электродвигателем, используются токоизмерительные клещи
, измеряющие ток в цепи без ее разрыва.
При использовании мультиметра
() или амперметра
нужно заранее убедиться в том, что ожидаемое значение измеряемого параметра лежит в диапазоне измерений. Прибор подключается последовательно с электродвигателем или с одной из обмоток трех фаз. И не стоит забывать о пусковом токе
, перед запуском прибор нужно надежно закоротить
, чтобы он не сгорел.
Можно воспользоваться и электронным счетчиком
с функцией измерения токов.
Если потребляемая мощность уже известна, ток можно подсчитать. Для однофазного двигателя
:
Для трехфазного
:
Если измерения производятся без нагрузки, то получится ток холостого хода
. Подсчитать номинальный ток не представляется возможным, так как ток холостого хода не нормируется и составляет 20-40% от номинального. В этом случае для подсчета токов холостого хода трехфазных асинхронных электродвигателей используются данные таблицы.
| Мощность двигателя, кВт | Ток холостого хода (в процентах от номинального) | |||||
| При частоте вращения, об/мин | ||||||
| 3000 | 1500 | 1000 | 750 | 600 | 500 | |
| 0,12-0,55 | 60 | 75 | 85 | 90 | 95 | |
| 0,75-1,5 | 50 | 70 | 75 | 80 | 85 | 90 |
| 1,5-5,5 | 45 | 65 | 70 | 75 | 80 | 85 |
| 5,5-11 | 40 | 60 | 65 | 70 | 75 | 80 |
| 15-22,5 | 30 | 55 | 60 | 65 | 70 | 75 |
| 22,5-55 | 20 | 50 | 55 | 60 | 65 | 70 |
| 55-110 | 20 | 40 | 45 | 50 | 55 | 60 |
СКОЛЬЖЕНИЕ РОТОРА
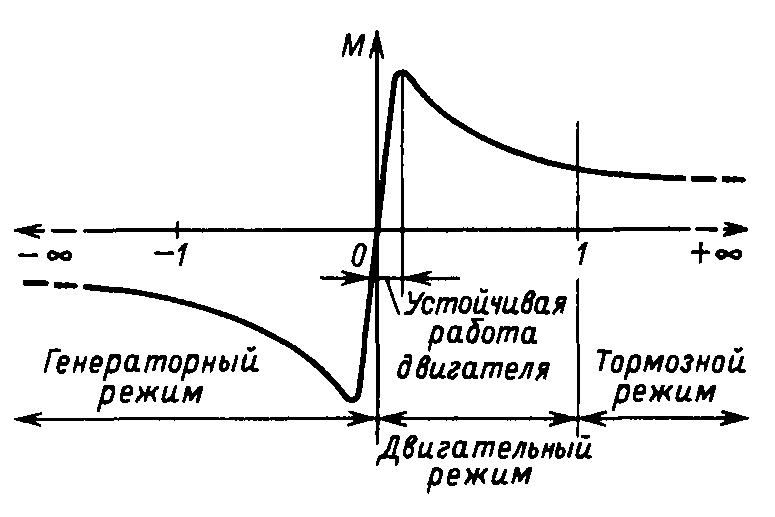
Ротор асинхронного двигателя всегда должен отставать от вращающегося магнитного потока. Скорость вращения потока принято означать п1,она постоянна, так как р = const и f1 = const. Скорость вращения ротора можно обозначить п2. Величина называется скольжение м.
Теоретически скольжение меняется от 1 до 0 или от 100% до 0, так как при неподвижном роторе в первый момент пуска п2 = 0, а если вообразить, что ротор вращается синхронно с потоком, п2 = п1.Чем больше нагрузка на валу, тем больший тормозной момент должен уравновеситься большим вращающим моментом. Последнее возможно только при увеличении I2, а значит, и Е2. Как будет показано ниже, Е2увеличивается при уменьшении n2, т. е. при увеличении s.Таким образом, при увеличении нагрузки на валу скорость ротора п2уменьшается. Скольжение при номинальной нагрузке Sн у асинхронных двигателей равно от 1 до 6%; меньшая цифра относится к мощным двигателями
Ремонт обмоток якорей
Неисправности в обмотках якорей машин постоянного тока могут быть в виде соединения обмотки с корпусом, межвитковых замыканий, обрывов проводов и отпайки концов обмотки от коллекторных пластин.
Для проведения ремонта обмотки якорь очищают от грязи и масла, снимают бандажи, распаивают соединения с коллектором и удаляют старую обмотку. Для облегчения извлечения обмотки из пазов якорь прогревают при температуре 80 — 90 °С в течение 1 ч. Для подъема верхних секций катушек забивают шлифованный клин в паз между катушками, а для подъема нижних сторон катушек — между катушкой и дном паза. Пазы очищают и покрывают изоляционным лаком.
В якорях машин мощностью до 15 кВт с полузакрытой формой паза применяют всыпные обмотки, а для машин большей мощности при открытой форме паза — катушечные обмотки. Катушки выполняют из провода круглого или прямоугольного сечения. Наиболее широко распространены шаблонные якорные обмотки из изолированных проводов или медных шин, изолированных лакотканью или микалентой.
Секции шаблонной обмотки наматывают на универсальный шаблон в форме лодочки и затем растягивают, так как она должна лежать в двух пазах, расположенных по окружности якоря. После придания окончательной формы катушку изолируют несколькими слоями ленты, пропитывают два раза в изоляционных лаках, сушат и облуживают концы проводов для последующей пайки в коллекторных пластинах.
Изолированную катушку вкладывают в пазы сердечника якоря. Закрепляют в них специальными клиньями и присоединяют провода к пластинам коллектора пайкой припоем ПОС-30. Клинья прессуют из теплостойких пластичных материалов — изофлекса-2, тривольтерма, пленки ПТЭФ (полиэтилентерефталатные).
Соединение концов обмотки пайкой проводят очень внимательно, так как некачественное выполнение пайки приведет к местному увеличению сопротивления и повышению нагрева соединения при работе машины. Качество пайки проверяют осмотром места пайки и измерением переходного сопротивления, которое должно быть одинаковым между всеми парами пластин коллектора. Затем пропускают по обмотке якоря рабочий ток в течение 30 мин. При отсутствии дефектов в местах соединения должен отсутствовать повышенный местный нагрев.
Все работы по демонтажу бандажей, наложению бандажей из проволоки или стеклоленты на якорях машин постоянного тока проводятся в том же порядке, что и при ремонте обмоток фазных роторов асинхронных машин.
Основные режимы работы электродвигателей
Существуют три основных (продолжительный, кратковременный, повторно-кратковременный) и пять дополнительных режимов работы, условно маркированных согласно международной классификации S1-S8. Отечественные электромашиностроительные заводы в обязательном порядке включают номинальные данные на основные режимы в каталоги и паспорт агрегата.
Продолжительный режим (S1) предусматривает длительный и беспрерывный рабочий период, во время которого двигатель нагревается до установившейся температуры. Он может «подразделяться» на два вида:
- Режим с постоянной нагрузкой (без изменения температуры в период работы). В нем функционируют двигатели конвейеров, электроприводы вентиляторов и насосов.
- Режим с изменяющейся нагрузкой (температура поднимается или падает с изменением нагрузки). Он используется при работе металлорежущих, деревообрабатывающих и прокатных станков.
Кратковременный режим работы электродвигателя (S2) характеризуется непродолжительным рабочим периодом (по стандартам 10, 30, 60, 90 минут) без нагрева двигателя до установившейся температуры с последующим его охлаждением во время паузы до температуры окружающей среды. В этом режиме действуют электроприводы запорных устройств (вентилей, шлюзов, заслонок и т.д.). В паспорте двигателя указывается продолжительность рабочего периода (например, S2 – 60 мин.).
Повторно-кратковременный режим работы электродвигателя (S3) – режим, при котором в течение рабочего периода нагрев двигателя не достигает установившейся температуры, а во время паузы не происходит охлаждения до температуры окружающей среды. Он характеризуется непрерывным чередованием периодов работы под нагрузкой и вхолостую. Так функционируют электроприводы подъемных кранов, экскаваторов и лифтов, то есть устройств, действующих циклично.
Принцип действия теплового автоматического выключателя
На графике справа показана зависимость сопротивления от температуры для стандартного теплового автоматического выключателя. У каждого производителя эта характеристика своя. TN обычно лежит в интервале 150-160 °C.
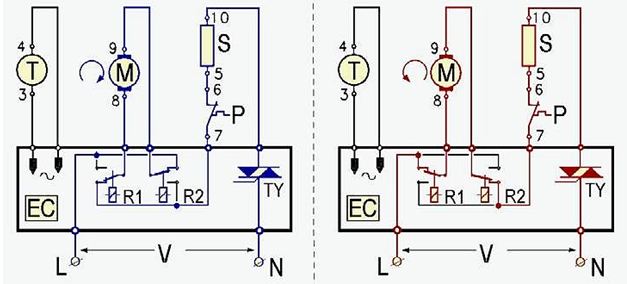
Подключение
Подключение трёхфазного электродвигателя со встроенным тепловым выключателем и реле перегрузки.
Обозначение TP на графике
Защита по стандарту IEC 60034-11:
TP 111 (постепенная перегрузка). Для того чтобы обеспечить защиту при блокировке ротора, электродвигатель должен быть оборудован реле перегрузки.
Терморезисторы, встраиваемые в обмотки
Второй тип внутренней защиты — это терморезисторы, или датчики с положительным температурным коэффициентом (PTC). Терморезисторы встраиваются в обмотки электродвигателя и защищают его при блокировке ротора, продолжительной перегрузке и высокой температуре окружающей среды. Тепловая защита обеспечивается с помощью контроля температуры обмоток электродвигателя с помощью PTC датчиков. Если температура обмоток превышает температуру отключения, сопротивление датчика меняется соответственно изменению температуры.
В результате такого изменения внутренние реле обесточивают контур управления внешнего контактора. Электродвигатель охлаждается, и восстанавливается приемлемая температура обмотки электродвигателя, сопротивление датчика понижается до исходного уровня. В этот момент происходит автоматическое приведение модуля управления в исходное положение, если только он предварительно не был настроен на сброс данных и повторное включение вручную.
Если терморезисторы установлены на концах катушки самостоятельно, защиту можно классифицировать только как TP 111. Причина в том, что терморезисторы не имеют полного контакта с концами катушки, и, следовательно, не могут реагировать так быстро, как если бы они изначально были встроены в обмотку.
Система, чувствительная к температуре терморезистора, состоит из датчиков с положительным температурным коэффициентом (PTC), устанавливаемых последовательно, и твердотельного электронного выключателя в закрытом блоке управления. Набор датчиков состоит из трёх — по одному на фазу. Сопротивление в датчике остаётся относительно низким и постоянным в широком диапазоне температур, с резким увеличением при температуре срабатывания. В таких случаях датчик действует как твердотельный тепловой автоматический выключатель и обесточивает контрольное реле. Реле размыкает цепь управления всего механизма для отключения защищаемого оборудования. Когда температура обмотки восстанавливается до допустимого значения, блок управления можно привести в прежнее положение вручную.
Все электродвигатели Grundfos мощностью от 3 кВт и выше оснащены терморезисторами. Система терморезисторов с положительным температурным коэффициентом (PTC) считается устойчивой к отказам, так как в результате выхода из строя датчика или отсоединении провода датчика возникает бесконечное сопротивление, и система срабатывает так же, как при повышении температуры, — происходит обесточивание контрольного реле.
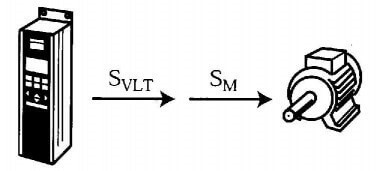
Как рассчитать частотник под двигатель
Есть несколько способов расчета для выбора частотного преобразователя. Рассмотрим их.
Подбор по току:
Ток преобразователя частоты должен быть равен или большим чем ток для трёхфазного электродвигателя, потребляемый при полной нагрузке.
Допустим есть асинхронный двигатель с характеристиками:
- P = 7,5 кВт;
- U = 3х400 В;
- I = 14,73 А.
Значит длительный выходной ток частотного должен быть равен или больше чем 14.73А. Расчет показывает, что это равняется 9.6 кВА при постоянной или квадратичной характеристике крутящего момента. Таким требованиям с небольшим запасом соответствует модель: Danfoss VLT Micro Drive FC 51 11 кВт/3ф, которую будет вполне разумно выбрать.

Выбор по полной мощности:
Допустим есть двигатель АИР 80А2, на табличке которого указано (для треугольника):
- P= 1,5 кВт;
- U=220 В;
- I=6 А.
Рассчитаем S:
S=3*220*(6/1,73)=2283 Вт =2,3 кВт
Выбираем преобразователь частоты с хорошим запасом, при том что мы его будем подключать к однофазной сети и использовать для управления вращением шпинделя токарного станка. Ближайшая модель, которая для этого подойдет: CFM210 3,3 кВт.

Стоит отметить, что модельный ряд большинства производителей соответствует стандартному ряду мощностей асинхронных двигателей, что позволит сделать выбор частотника с соответствующей мощностью (не превышающей). Если вы используете заведомо более мощный двигатель и не нагружаете его полностью, можно измерить фактический ток потребления и подобрать преобразователь частоты исходя из этих данных. В общем при расчёте частотника для двигателя учитывайте:
- Максимальный потребляемый ток.
- Перегрузочную способность преобразователя.
- Тип нагрузки.
- Как часто и насколько долго могут возникать перегрузки.
Теперь вы знаете, как выбрать частотный преобразователь для электродвигателя и на что обратить внимание при выборе данного типа устройств. Надеемся, предоставленные советы помогли вам подобрать подходящую модель под собственные условия!. Материалы по теме:
Материалы по теме:
- Как выбрать тепловое реле для электродвигателя
- Что такое автоматическая частотная разгрузка
- Измерение частоты переменного тока
Опубликовано:
23.01.2019
Обновлено: 10.04.2019
Параметры и режимы работы
На основании вышеприведенных признаков подразумеваются следующие режимы работы, всего их 9:
- Продолжительный или длительный режим с постоянной нагрузкой– S1;
- Кратковременный, с полной нагрузкой – в течение заданного времени – S2;
- Периодический кратковременный – в течение определенного по времени чередующимися периодами с полной нагрузкой – S3;
- Режим с длительным периодом пуска, с определенными циклами работы в течение заданного периода времени– S4;
- С быстрым торможением при помощи электрического способа – S5;
- С кратковременной полной величиной нагрузки, режим включает циклы с полной токовой нагрузкой и холостым ходом – S6;
- Режим с торможением электрическим способом, в течение длительного непрерывного периода работы – S7;
- С изменением величины токовой нагрузки и значения скорости вращения, происходящими одновременно, с различными по протяженности периодами и с разной частотой вращения двигателя – S8;
- Изменение скорости вращения нагрузки, происходящее в неопределенные периоды времени, изменение величины токовой нагрузки и скорости вращения соответственно рабочему диапазону – S9.
Основные параметры – это: напряжение по номинальному пределу, частота, ток номинальный, мощность на валу двигателя, количество оборотов вращения вала, КПД (коэффициент полезного действия), коэффициент мощности. При соединении обмоток электродвигателя в треугольник или звезду дается параметр их напряжения и тока при обоих этих соединениях.
При пуске АД на полное значение напряжения создается высокий пусковой ток, в это время значение пускового момента невелико, для его увеличения применяется повышение активного сопротивления вторичной цепи.